 2018-01-08
2018-01-08 5909
5909Каждый объект управления характеризуется определенными свойствами. Эти свойства должны быть учтены при создании и настройке контуров управления, причем динамические свойства объекта управления должны соответствовать динамическим параметрам выбранного контура управления. Индивидуальные свойства объекта и регулятора определяются статическими и динамическими характеристиками, которые определяются расчетным путем или эмпирически.
Статической характеристикой объекта управления называется зависимость выходного регулируемого параметра от входного (управляющего воздействия) в установившемся (статическом) состоянии.
Статические характеристики необходимы для:
· определения границы (зоны) управляемости;
· определения линейности системы. Вся теория справедлива для линейных систем. В линейной системе статическая характеристика имеет линейный вид,  - коэффициент передачи должен быть постоянным.
- коэффициент передачи должен быть постоянным.

Рис 33. Статическая характеристика линейного ОУ
Реальные статические характеристики, как правило, нелинейны и коэффициент передачи не постоянен и является функцией от управляющего воздействия.
Примечание
Статическую характеристику имеют только объекты с самовыравниванием, т.е. такие объекты управления, регулируемый параметр которых после внесения возмущения может устанавливаться на новом определенном значении.
Астатические (интегральные) объекты управления статической характеристики не имеют. Примеры объектов с самовыравниванием и без самовыравнивания приведены на рисунках ниже.

Рис 33*. Объекты с самовыравниванием и без самовыравнивания
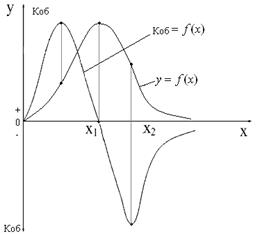
Рис 34. Статическая характеристика экстремального вида
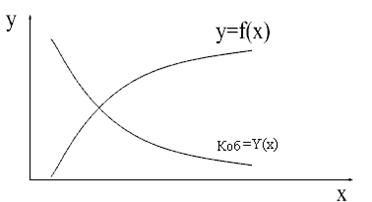
Рис 35. Статическая характеристика нелинейного объекта управления
По виду статической характеристики нужно выбрать тип регулирующих законов, которые следует применять для управления данным объектом управления.
Примечание
Для того, чтобы учесть закон изменения коэффициента передачи при изменении управляющего воздействия, необходимо при формировании структурной схемы объект управления аппроксимировать следующей структурой, представленной на рис.36.
Схема представляет собой последовательное соединение трех звеньев:
- статического звена, обычно с нелинейной характеристикой y=f(x);
- динамического инерционного звена, характеризующего инерционные свойства объекта управления;
- при  - динамического звена первого порядка, характеризующего запаздывающие свойства объекта управления.
- динамического звена первого порядка, характеризующего запаздывающие свойства объекта управления.
 Рис 36. Структурная схема нелинейной системы с двумя инерционностями To и τЗ
Рис 36. Структурная схема нелинейной системы с двумя инерционностями To и τЗ

Рис 37. Структурная схема линейной системы с двумя инерционностями при Кр=const
В реальных условиях установившегося состояния объекта управления практически никогда не существует в результате воздействия на объект управления различных технологических возмущений и случайных помех – это означает, что объект управления находиться в основном в неустановившемся режиме, а статическая характеристика выступает в виде цели, к которой стремится регулируемый параметр во времени.
Для характеристики поведения объекта управления в неустановившемся режиме используются динамические характеристики, позволяющие количественно оценить инерционность и запаздывание реального объекта управления. Эти динамические параметры определяются по динамическим характеристикам.
Динамической характеристикой называется траектория изменения регулируемого выходного параметра при стандартном изменении управляющего воздействия.
В зависимости от вида стандартного возмущения характеристики делятся на:
· Кривая разгона – это реакция системы на однократное скачкообразное возмущение. Этот тип возмущения легко реализуется и стандартизуется. Не путать кривую разгона с переходной функцией и временной характеристикой, которые рассматривают траекторию при однократном единичном ступенчатом воздействии, и использующиеся для теоретического анализа.
· Импульсная характеристика – это реакция системы или объекта исследования на импульсное возмущающее воздействие.
· Частотная характеристика – реакция объекта на гармонический возмущающий сигнал постоянной амплитуды и переменный по частоте.
Вопрос: чем отличаются АФЧХ двух инерционных звеньев с различными величинами постоянных времени?

Рис 38. АФЧХ инерционного звена первого порядка для Tо=1с;То=100с
· Передаточная функция объекта, которая является формализованным алгебраическим представлением дифференциального уравнения, определяющим динамику объекта, также является динамической характеристикой, так как для инерционного объекта управления, имеющего передаточную функцию  , уравнение будет иметь вид:
, уравнение будет иметь вид:
Так как все виды динамических характеристик отображают одни и те же свойства исследуемого объекта, то они могут перестраиваться из одного типа в другой, и целью эксперимента является изучение этого перехода (см. лабораторный практикум).
По виду динамических характеристик объекты делятся на следующие типы:
· объекты с самовыравниванием;
· объект без самовыравнивания;
· объект с самовыравниванием и без самовыравнивания и с запаздыванием;
Примерно 95% являются объектами с самовыравниванием.
Свойство объекта переходить в новое установившееся состояние при нанесении однократного скачкообразного возмущения называется самовыравниванием.
В случае наличия объектов без самовыравнивания, называемых астатическими, управление такими объектами требует применения определенных мер и правильного выбора закона регулирования, т.к. любое остаточное отклонение приведет к аварийному режиму.
Кривые разгона и динамические параметры таких объектов приведены на
рис. 39 а, б, в.

Рис 39. Кривые разгона: а) объекта с самовыравниванием; б)объекта без самовыравнивания; в) объекта с запаздыванием и самовыравниванием

