2018-01-08
2018-01-08 1827
1827
1.5.1. Вычислительная схема, основанная на преобразовании обратных матриц. Анализируя вычислительную процедуру симплекс-метода с позиций оценки трудоемкости, нетрудно заметить, что наиболее критичным в этом плане является этап пересчета значений А и b при переходе от одного базисного плана к другому (п. 3 алгоритма). Однако в том случае, когда число ограничений задачи m явно меньше количества переменных n, можно добиться существенной «экономии», выполняя на очередной итерации q преобразование Жордана—Гаусса не над матрицей А (β( q )), а над матрицей Δ-1(β( q )). При этом учитывается и то, что при необходимости, применяя формулу (1.26), всегда можно получить А (β( q )) по Δ-1(β( q )). Более того, для выполнения описанных выше действий симплекс-процедуры нам в действительности не требовалась матрица А (β( q )) целиком. Реально в ней использовались только строка оценок a 0(β( q )) и ведущий столбец al (β( q )). Данные соображения положены в основу вычислительной схемы симплекс-метода, основанной на преобразовании обратных матриц, которую также называют модифицированным симплекс-методом. Впервые данный алгоритм был предложен в 1951 г. в работах Л. В. Канторовича.
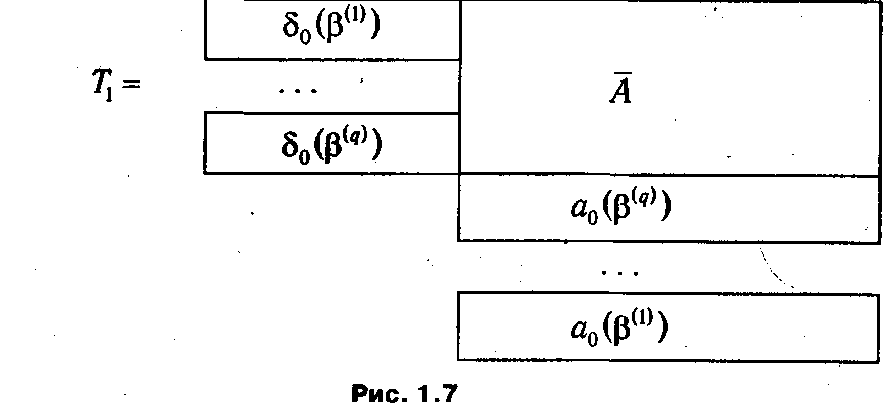
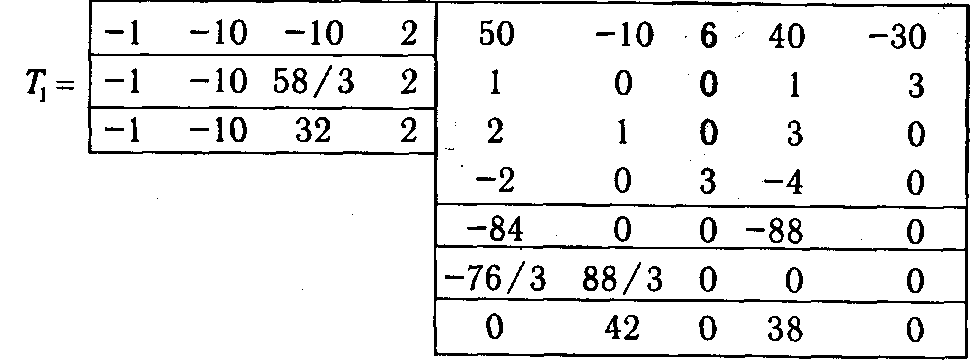
Вычислительной схеме модифицированного симплекс-метода соответствует система таблиц T 1 и Т 2( q ). Таблица T 1 (рис. 1.7) является общей для всех итераций и служит для получения строки оценок текущего базисного плана a 0(β( q )). Если обозначить через δ i (β( q )) (i Î 0: m) строки матрицы Δ-1(β( q )), то из (1.26), в частности, следует, что

Как видно из рис. 1.7, T 1 состоит из трех блоков:
Ø Ø в центре содержится матрица А;
Ø Ø в левом блоке таблицы на каждой итерации дописываются нулевые строки матрицы Δ-1(β( q )) для текущего базиса;
Ø Ø нижний блок, расположенный под матрицей А, на каждой итерации дополняется строкой оценок текущего плана, вычисленной по формуле (1.42).
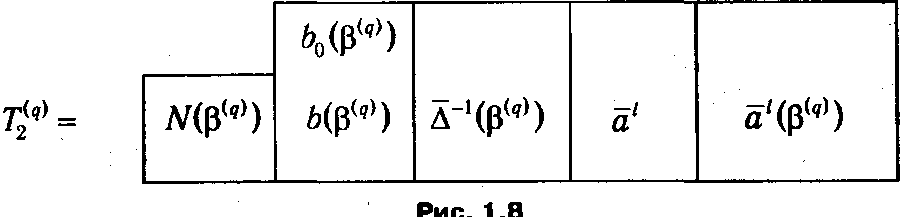
Симплекс-таблица Т 2( q ), изображенная на рис. 1.8, соответствует допустимому базису КЗЛП β( q ), получаемому на q -й итерации. Столбец N (β( q )) содержит номера базисных столбцов (в последовательности вхождения в базис); столбец b (β( q )) — компоненты вектора ограничений относительно текущего базиса β( q ); Δ-1(β( q )) — матрица, обратная по отношению к матрице расширенных столбцов текущего базиса β( q ); графа аl содержит расширенный вектор условий, вводимый в базис на текущей итерации, а следующая графа — координаты аl (β( q )) этого же столбца в текущем базисе β( q ).
По аналогии с п. 1.4.1 опишем формальную схему алгоритма модифицированного симплекс-метода.
0-этап. Нахождение допустимого базисного плана.
1. Для поиска допустимого базиса может быть применен метод минимизации невязок, рассмотренный в п. 1.4.5. При этом для решения вспомогательной задачи используется процедура модифицированного симплекс-метода. В результате 0-этапа мы получаем допустимый базисный план x (β(1)) и соответствующие ему матрицу Δ-1(β(1)) и вектор b (β(1)).
2. Заполняем центральную часть таблицы T 1, содержащую матрицу А.
3. Содержимое матрицы Δ-1(β(1)) и вектора b (β(1)), полученных на этапе поиска допустимого базисного плана, переносится в таблицу T 2(1).
4. Полагаем номер текущей итерации q равным 1 и переходим к I-этапу.
1-этап. Стандартная итерация алгоритма — выполняется для очередного базисного плана x (β( q )).
1°. Проверка оптимальности текущего базисного плана. Содержимое нулевой строки таблицы T 2( q ) — δ0(β( q )) переписывается в соответствующую графу таблицы T 1. По формуле (1.42) рассчитываем и заполняем строку a 0(β( q )). Осуществляем просмотр строки оценок a 0(β( q )). Возможны два варианта:
1΄. a 0(β( q ))≥0 —план, соответствующий текущему базису задачи, оптимален. Вычислительный процесс закончен. Согласно формулам (1.33) и (1.32) выписываются оптимальный план задачи х * = x (β( q )) и оптимальное значение целевой функции f (х *) = f (x (β( q ))).
1". В строке оценок a 0(β( q )) существует по меньшей мере один элемент a 0, j (β( q ))<0, т. е. имеющий отрицательную оценку. Следовательно, план x (β( q )) — неоптимален. Выбирается номер l, соответствующий элементу, имеющему минимальную (максимальную по абсолютной величине) отрицательную оценку:

l -й столбец матрицы A становится ведущим и должен быть введен в очередной базис. Переходим к пункту 2° алгоритма.
2°. Определение столбца, выводимого из базиса. Переписываем ведущий столбец аl из таблицы T 1 в текущую таблицу Т 2( q ). По формуле аl (β( q )) = Δ-1(β( q )) аl заполняем соответствующий столбец в таблице Т 2( q ). Возможны два варианта:
2'. Для всех i Î 1: m аi,l (β( q ))≤0. Делается вывод о неограниченности целевой функции и завершается вычислительный процесс.
2". Существует по крайней мере один индекс i Î 1: m, для которого аi,l (β( q ))>0. Согласно правилу (1.27) определяются место r и номер Nr (β( q )) для столбца, выводимого из базиса. Переходим к пункту 3° алгоритма.
3°. Пересчет относительно нового базиса элементов столбца b и матрицы Δ-1. Переход к новому базису β( q +1), который получается введением в базис β( q ) столбца аl и выводом из него столбца аr, осуществляется по формулам, аналогичным формулам (1.28)-(1.31). Они имеют вид:
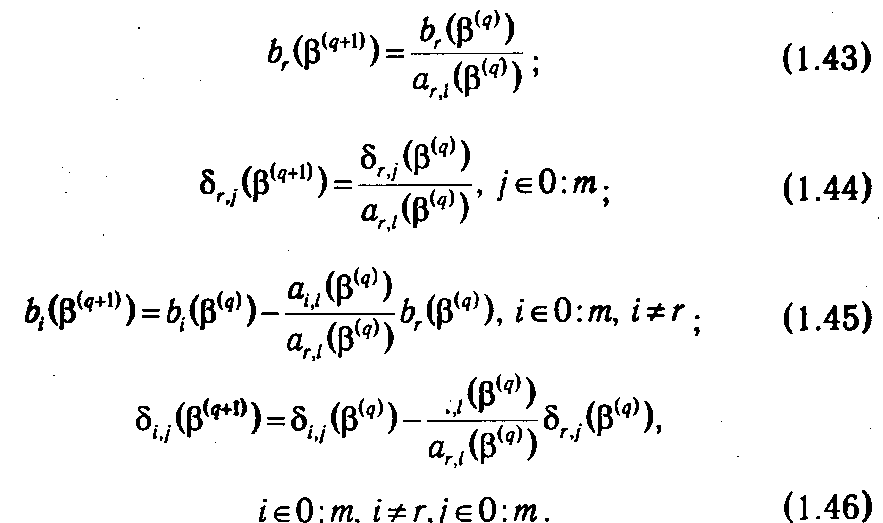
Полагаем номер текущей итерации q: = q +l и переходим к первому пункту алгоритма.
В завершение подчеркнем, что в силу приведенных выше преимуществ именно модифицированный симплекс-метод реально применяется в программном обеспечении, предназначенном для решения канонических задач линейного программирования.
1.5.2. Пример решения ЗЛП модифицированным симплекс-методом. Приведем решение рассмотренной ранее задачи (1.34)-(1.35), основанное на использовании процедуры модифицированного симплекс-метода. По аналогии с п. 1.4.3 оно начинается с выбора очевидного исходного базиса, образуемого столбцами {5,2,3}. Для него уже были вычислены Δ-1(β( q )) и b (β( q )), поэтому заполнение начальных таблиц T 1 и Т 2(1) не представляет труда.
На первой итерации мы переписываем нулевую строку

из Т 2(1) в T 1 и, умножив ее на матрицу A, получаем строку оценок

Так как a 0(β(1)) содержит отрицательные элементы, то делаем вывод о неоптимальности плана, соответствующего базису β(1), и, выбрав наименьшую отрицательную оценку (-88), получаем номер столбца, вводимого в базис, l = 4.
Переписываем столбец
из таблицы T 1 в Т 2(1) и пересчитываем его координаты относительно текущего базиса, т. е. умножаем матрицу Δ-1(β( q )), расположенную в таблице Т 2(1) слева, на а 4.
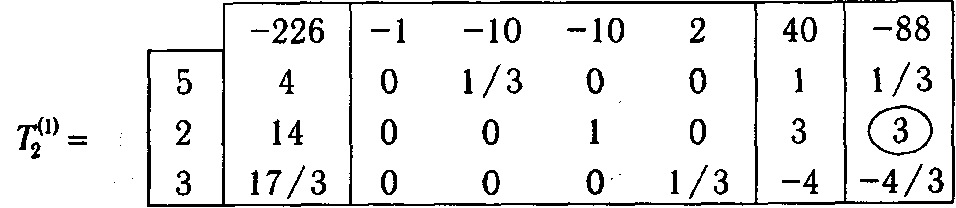
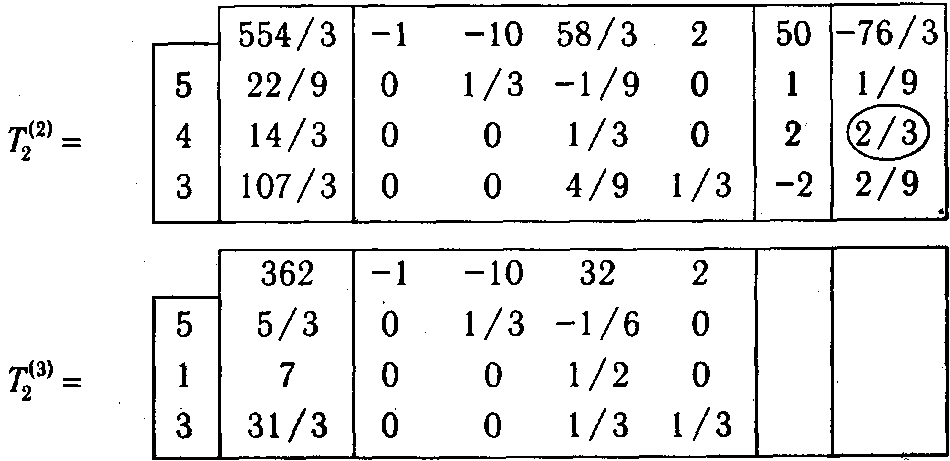
После заполнения таблицы Т 2(1) данными по вводимому в новый базис столбцу можно перейти к определению номера выводимого столбца. Эта процедура осуществляется в полной аналогии с обычным симплекс-методом. Рассмотрев отношения элементов bi (β(1)) и ai,l (β(1)) для { i Î1: m| ai,l (β(1))>0} и определив минимальное из них, находим, что r = 2. Следовательно, столбец с номером N 2(β( q )) = 2 должен быть выведен из базиса. Таким образом, получаем очередной допустимый базис задачи с N (β(2)) = {5, 4, 3}. Элемент a 2,3(β(1)) является ведущим (обведен кружком). Применив формулы (1.43)-(1.46), переходим к симплекс-таблице, соответствующей второй итерации Т 2(2), и полагаем индекс текущей итерации q = 2.
Повторяя те же самые действия (их легко проследить по приводимым здесь таблицам Т 2(2) и Т 2(3), на третьей итерации мы получим оптимальный план задачи и оптимальное значение целевой функции, которые извлекаются из второго столбца таблицы Т 2(3). Легко заметить, что в процессе решения мы «прошли» по той же самой последовательности допустимых базисных планов, которая встречалась в п. 1.4.3.