 2018-01-21
2018-01-21 923
923За типовое воздействие везде принимается ступенька 100 мА, что соответствует повороту руля на 5,73 градуса.
На рис. №, №, №, № показано влияние шарнирного момента на поворот руля и перепад давлений на поршне гидроцилиндра при Кос=300 В/м.
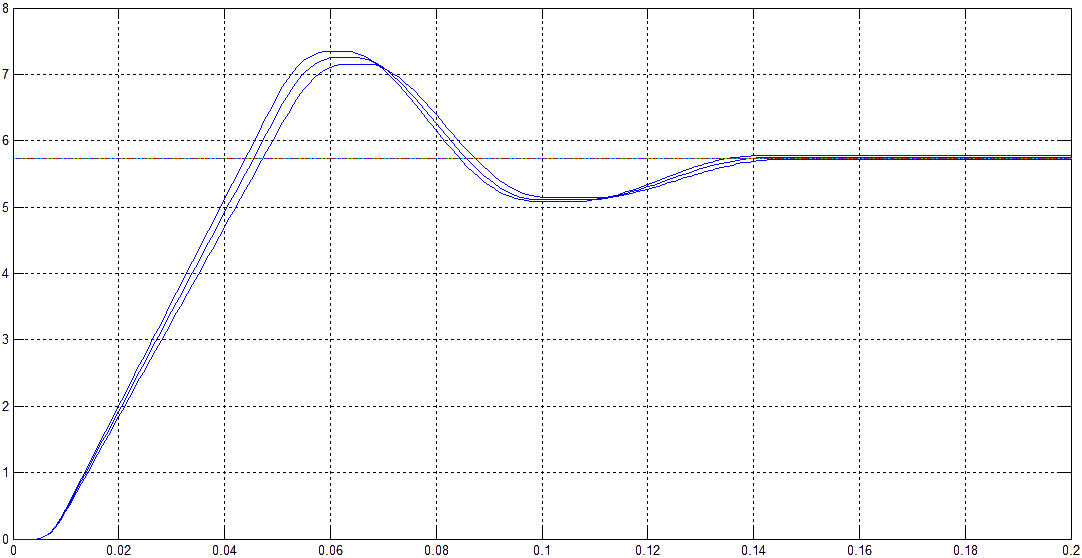
Рис. № Влияние шарнирного момента на поворот руля
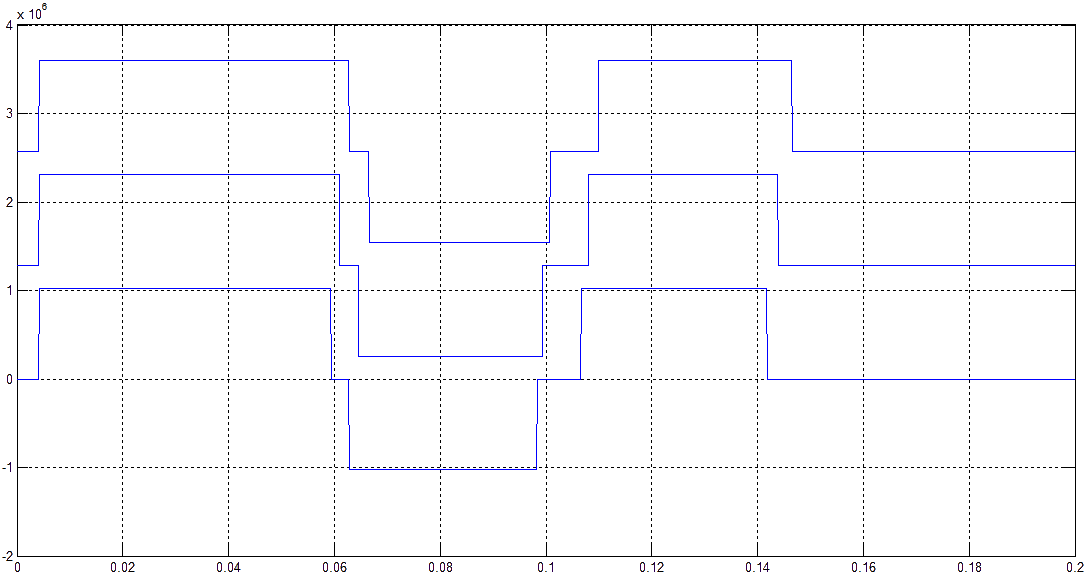
Рис. № Влияние шарнирного момента на перепад давлений на поршне гидроцилиндра
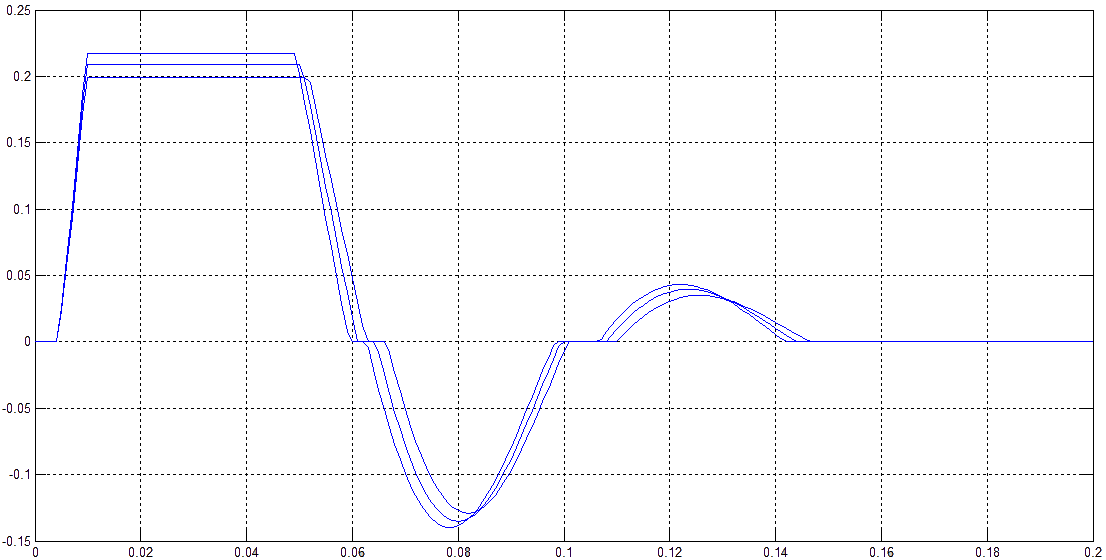
Рис. № Влияние шарнирного момента на скорость штока
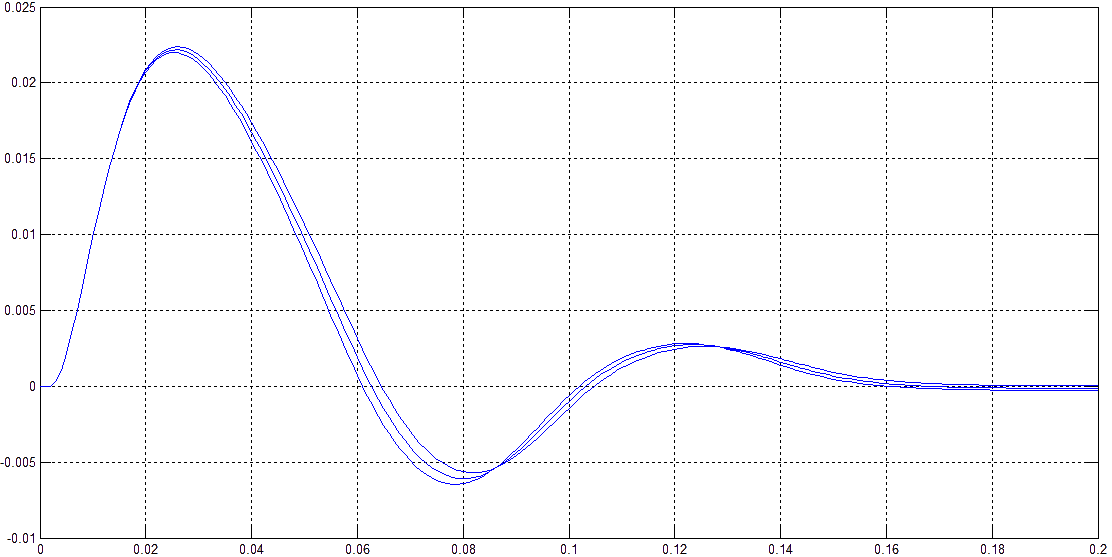
Рис. № Влияние шарнирного момента на ток гидроусилителя
Далее на рис. №,№, № показано влияние давления нагнетания на различные параметры.
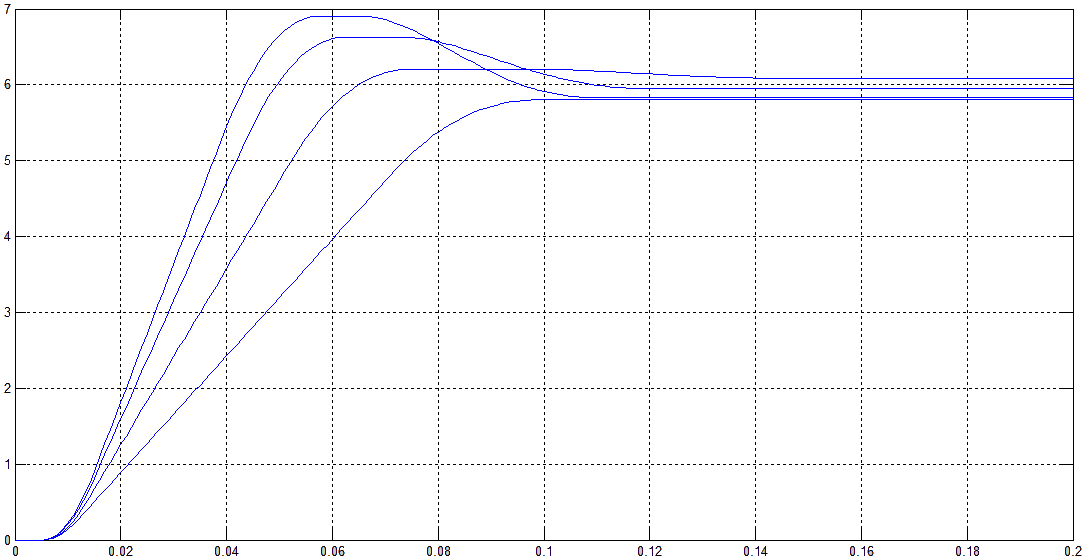
Рис. № Влияние давления нагнетания на поворот руля
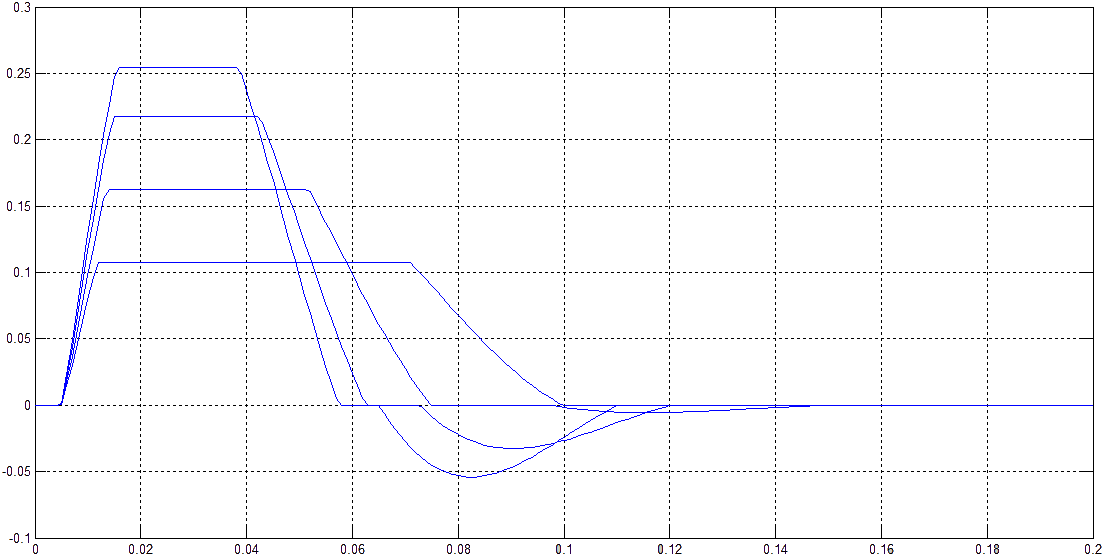
Рис. № Влияние шарнирного момента на перепад давлений на скорость перемещения штока гидроцилиндра
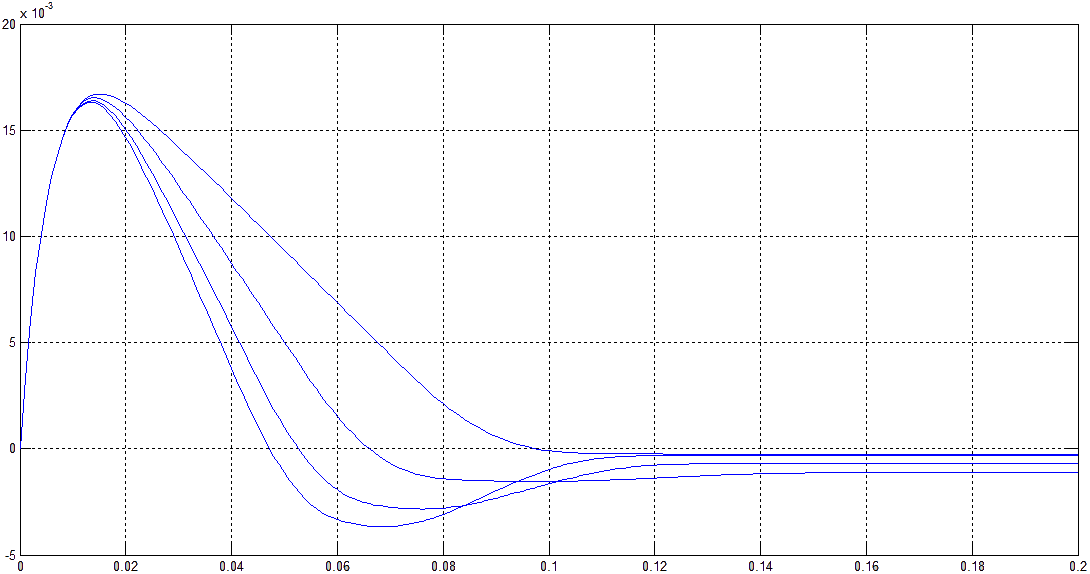
Рис. № Влияние шарнирного момента на ток усилителя сумматора
Далее на рис. № показано влияние запаздывания гидроусилителя на поворот руля.
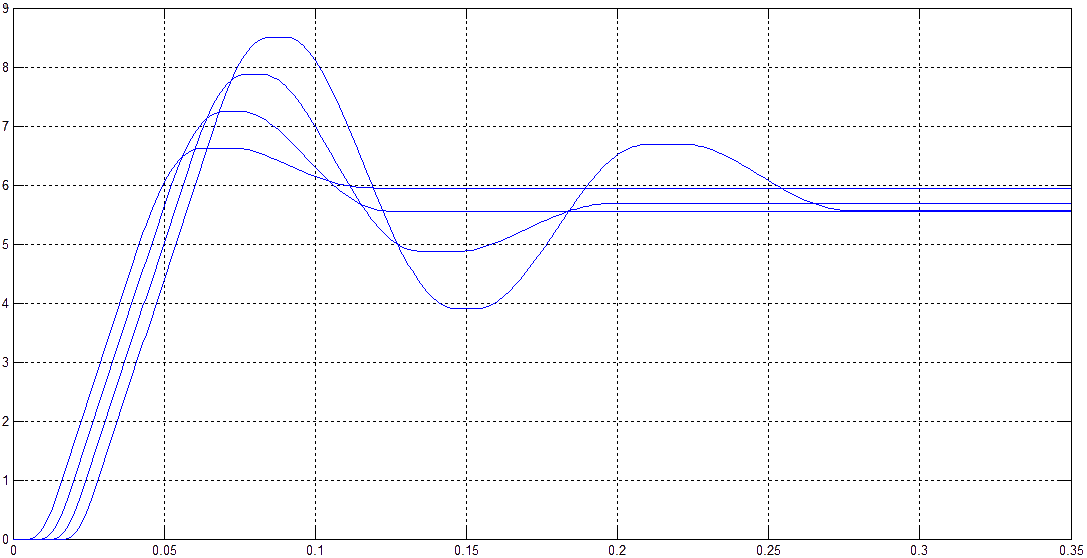
Рис. № Влияние запаздывания гидроусилителя на поворот руля при Кос=170 В/м
По результатам моделирования видно, что шарнирный момент не значительно сказывается на динамике работы привода. Это упрощает управление приводом с БЦВМ и свидетельствует о его качестве.
Давление нагнетания значительно сказывается на работе привода. Это означает, что требуется выбирать особое управление приводом или ставить регулятор.
Запаздывание гидроусилителя сильно сказывается на динамике привода, что свидетельствует о необходимости наличия высокотехнологичной производственной базы оборудования предприятияя изготовителя и высокой культуры производства.
ВЫВОДЫ ПО РАБОТЕ
В курсовом проекте рассмотрен следящий рулевой гидравлический привод дроссельного регулирования с обратной связью по положению. Выполнен обзор технических элементов, входящих в состав привода, рассмотрен принцип их работы каждого в отдельности и в составе привода. Произведена оценка достоинств и недостатков данного класса рулевых приводов. Составлена нелинейная математическая модель рулевого тракта и его упрощенная линеризованная математическая модель,
с пренебрежением некоторыми насыщениями и мертвыми зонами.
Проведено моделирование нелинейной и линеризованной модели рулевого привода, по результатам которого построены графики.
Учитывая результаты моделирования, сделаны выводы, в которых произведена оценка влияния запаздывания гидроусилителя, давления нагнетания, шарнирного момента на динамику работы рулевого привода. Все основные результаты работы представлены на плакатах.
ЗАКЛЮЧЕНИЕ
По результатам проделанной работы можно сделать вывод, что рулевой привод является объектом управления с достаточно сложным техническим составом и математическим описанием. Давление нагнетания существенно сказывается на динамике работы привода, поэтому чтобы избежать влияния его вредного влияния рассматривается перспектива поиска оптимального управления или подбора регулятора. Существует перспектива привязки на следующий курсовой проект математической модели рулевого привода к динамике конкретного ЛА.








