 2018-01-21
2018-01-21 951
951Тема: Вивчення пристрою вимірювальних приладів, апаратури захисту за електричною
схемою.
Ціль: вивчити пристрій вимірювальних приладів, апаратуру захисту за електричною схемою.
Оснащеність: показники глибини (сельсинний покажчик УГС - 4), АЗК.
Хід роботи
1. Ознайомитися з пристроєм вимірювальних приладів та їх призначенням.
2. Пристрій показника глибини.
3. Пристрій швидкостеметра.
4. АЗК його пристрій, структурна схема.
5. Кінцевий вимикач ВМ.
6. Оформити звіт і здати викладачу.
Теоретична частина.
Апарат завдання і контролю АЗК призначений для керування підйомними машинами і контролю їхньої роботи.
Апарат виконує наступні функції: видає імпульси в контрольованих крапках шляху руху підйомних судин для відповідних переключень у схемі автоматичного керування; задає програму ходу підйомної машини на максимальній і зниженій швидкостях; здійснює контроль фактичної швидкості у всіх періодах руху; перетворює обертання вала підйомної машини в ел. імпульси для виміру шляху сельсинними показниками глибини; забезпечує захист від перепідйому; робить корегування елементів апарата відповідно до положення підйомних судин у стовбурі при перестановці барабанів, при прослизанні канатів щодо багаторазових шківів тертя; компенсує помилки при витяжці каната та зносі її футерівки; контролює цілісність кінематичних цілей від підйомної машини і своїх власних.
Апарат має симетричну конструкцію з роздільною незалежно стежичою синхронізацією своїх обох частин.
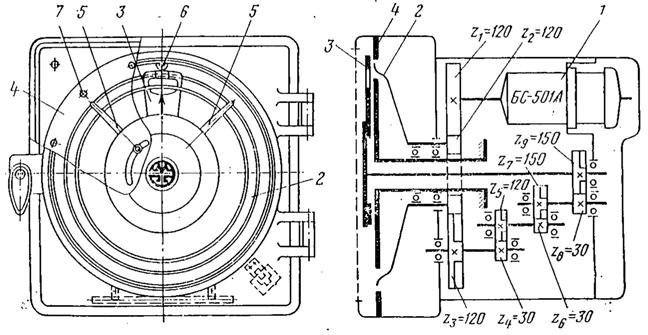
Апарат АЗК - 1 складається із шафи з приводом, блоку програмування при роз’їздах на максимальній швидкості БМП - 1, блоку програмування при роз’їздах на зниженій швидкості БПП - 1, двох реле контролю обертання РКВ - 1 і електричного обмежника швидкості ЭОС - 2 (мал. 18.1).
Від редуктора привода апарата обертання передається на вали блоків поверхових вимикачів, на блоки сельсинів-датчиків і до тахогенераторів контролю обертання.
У блоці сельсинів-датчиків і тахогенератора мається 2 сельсини-датчики, один із яких служить датчиком шляху ел. обмежника швидкості, а інший - для подачі сигналів сельсину-приймачу показника глибини УГС - 4. Тахогенератор подає сигнали на реле контролю цілісності кінематичного ланцюга АЗК.
Блоки програмування здійснюють регулювання прискорення й уповільнення підйомної машини при роз’їздах на максимальній і зниженій швидкостях. Блоки однакові по конструкції і складаються з редуктора і програмного пристрою.
На підйомній судині, датчика ДВМ на копрі і станції керування СВМ, розташованої в будинку підйомної машини.
Датчик ДВМ являє собою чуттєвий елемент, що регулює на зміну зовнішнього магнітного струму.
Станція СВМ є транзисторним підсилювачем перемінного струму, на виході якого включається електромагнітне реле. Контакт цього реле знаходиться в ланцюзі захисту.
При подачі живлення на затискачі 1 і 2 трансформатори Т3 з’являється напруга на затискачах 3 і 4 датчики ДВМ.
Датчик із затискачів 5 і 6 видає вихідний сигнал, який через трансформатор Т2, транзисторний підсилювач УТ і трансформатор Т1 надходить на вирівнювач У2 і потім на проміжне реле Р1. Останнє замкне контакт Р1 у ланцюзі реле РП1, що замкне контакт РП1 у ланцюзі захисту. При проходженні магніту МВМ поблизу датчика ДВМ вихідний сигнал останнього знижується до величини, меншої порога чутливості підсилювача УТ. Струм у реле Р1 знижується до нуля, від чого розімкнеться контакт Р1 у ланцюзі реле РП1. У зв'язку з цим контакт РП1 у ланцюзі захисту розімкнеться. Контакти РП і перемичка Х1-Х2 дозволяють розширити область застосування вимикача при автоматизації.
На мал. 18.2 УТ; Р1 - резистор, що створює постійне навантаження на вирівнювач У2, Др. - дросель; R1- конденсатор; Пр1 і Пр2- плавкі запобіжники.
Кінцеві вимикачі є надійним захистом від перепідйому при визначених швидкостях судини, тому по ПБ при максимальній швидкості 3м/сек. для дійсної і вище 2м/сек. для знову монтируємих підйомів застосовуються апарати контролю швидкості підходу судин до прийомних площадок.
Показники глибини, що вказують місце перебування підйомних судин у стовбурі в будь-який момент підйомної операції, бувають механічні й електричні.
Механічні показники глибини колонкового типу безпосередньо зв'язані з валом підйомної машини. Через приводний вал і систему зубчастих передач показника глибини, обертання передається від корінного вала двом вертикальним гвинтам із установленими на них гайками. Напрямки обертання гвинтів протилежні, отже одна гайка переміщається нагору, а інша вниз. При цьому стрілки, закріплені на гайках, указують на шкалі місце перебування судин у стовбурі. Механічні показники глибини не забезпечують точних показників і тому в даний час вони не виготовляються.
Електричні показники глибини не мають механічного зв'язку з корінним валом підйомної машини. Вони забезпечують високу точність визначення місця перебування судини в стовбурі.
Застосування одержали сельсини-показники глибини, встановлені на пульті керування. У сельсини-показнику глибини УГС-4 (мал. 18.3) сигнал від сельсина датчика, механічно зв'язаного з валом підйомної машини, надходить на сельсин приймача 1. Останній передає обертання кільцевій шкалі точного відліку 2 через пару шестерень з передатним відношенням 1:1.
Через систему шестерень з передатним відношенням 1:100 обертання передається також візиру грубого відліку 3. Кінцевому й іншому контрольованому положенню судини відповідає збіг міток на візира кільцевої і нерухомої 4 шкалах. З візиром зв'язані дві стрілки 5, що дозволяють спостерігати початок переходу машини на уповільнення. Контрольна лампа 6 сигналізує про останній оберт шкали точного відліку. По окружності шкали встановлені лампи підсвічування 7.
Для забезпечення в необхідних випадках роздільного показання положення правої і лівої судин на пультах керуваннях двохбарабанних машин і машин з розрізним барабаном мається два показника глибини з приводом відповідно від заклиненого і переставного барабана.
Швидкомітри показують величину швидкості в будь-який момент руху підйомних судин і записують діаграму її зміни.
Швидкомітри бувають механічні, що мають безпосередній зв'язок з корінним валом підйомної машини, і електричні, що не мають такого зв'язку.
На підйомних машинах старих випусків застосовуються механічні ртутно-поплавкові швидкоміри СШ-1. Від корінного вала підйомної машини через пасову передачу приводиться в обертання система 3 сполучених між собою трубок, у яких поміщена ртуть.
Відцентровими силами ртуть витісняється із середньої трубки в крайні. При цьому поплавець, що знаходиться в середній трубці, через систему важелів надають руху стрілці приладу і перо записуючого пристрою. Останнє викреслює на папері діаграму швидкості підйому.
На пультах керування сучасних підйомних машин встановлюються електричні швидкоміри, у якості яких застосовуються самописні вольтметри. Вольтметр одержує живлення від вимірювального тахогенератора.
Т. як. тахогенератор обертається від корінного вала підйомної машини його вхідна Э.Д.С. пропорційно-дійсної швидкості підйому. Тому шкала вольтметра від градуйована в м/с.
Вісь рухливої частини вимірювального приладу з'єднана з несущим важільцем 1, до якого прикріплена металева трубка 2. Один кінець трубки опущений у чорнильницю 3, на іншому кінці посаджений капіляр 4, і стрілка 5. Стрілка показує величину швидкості в м/с, а капіляр записує на паперовій стрічці діаграму швидкості. У процесі запису стрічка за допомогою стрічкопротягувального механізму рівномірно перемотується на прийомну касету.
Програмний пристрій складається з двох профільованих дисків, двох сельснних командо апаратів і 4 кінцевих мікро-вимикачів.
Реле контролю обертання РКВ - 1 призначено для контролю цілісності кінематичного ланцюга від вала підйомної машини до вала редуктора програмного пристрою. При несправності цього ж ланцюга реле спрацьовує, викликаючи запобіжне гальмування. На підйомних машинах старих випусків, не обладнаних апаратами АЗК застосований регулятор підйому (мал.18.5). Вал 1 такого регулятора приводиться в обертання від вала підйомної машини. Через зубцювату 2 і черв'ячну 3 передачі обертання подається на профільований диск 4 заклинені барабани підйомної машини, а через передачі 5, 6 і 7 на такий же диск 8 переставного барабана. Розчіпний пристрій 9 дозволяє відключати профільований диск 8 при перестановці барабана. На кожнім диску закріплені контролюючі профілі 2.
Апарати захисту необхідні для запобігання аварій підйомних установок. Ці апарати, у випадку неприпустимих відхилень контрольованих ними параметрів від заданих значень, вводять у дію запобіжне гальмо з одночасним відключенням підйомного двигуна. На (мал.18.6) показаний ланцюг захисту з контактором запобіжного гальма КТП і зв'язок її з ланцюгом реверсивних контакторів В і Н із ланцюгом гальмового ел. магніту ТП. Кінцеві вимикачі, що служать для запобігання пере підйому судин, бувають контактні і безконтактні. Контактні вимикачі встановлюють в апараті завдання і контролю ходу, а контакти їх включені безпосередньо в ланцюг захисту.
Найбільше застосування одержали магнітні вимикачі ВМ. Безконтактні магнітні вимикачі ВМ складаються з постійного магніту МВМ, закріпленого на підйомній судині, датчика ДВМ на копрі і станції керування СВМ, розташованої в будинку підйомної машини. Датчик ДВМ являє собою чуттєвий елемент реагуючий на зміну зовнішнього магнітного поля. Ланцюг датчика іскробезпечний.
Станція СВМ є транзисторним підсилювачем перемінного струму, на виході якого включене електромагнітне реле. Контакт цього реле знаходиться в ланцюзі захисту. При подачі живлення на затискачі 1 і 2 трансформатора Т3 з'являється напруга на затискачах 3 і 4 датчики ДВМ. Датчик із затискачами 5 і 6 видає вихідний сигнал, що через трансформатор Т2, транзисторний підсилювач УТ і трансформатор Т1 надходить на вирівнювач У2 і потім на проміжне реле Р1. Останнє замкне контакт Р1 у ланцюзі реле РП1, що, у свою чергу, замкне контакт РП1 (затискачі 7 - 8) у ланцюзі захисту. При проходженні магніту МВИ поблизу датчика ДВМ вихідний сигнал останнього знижується до величини, меншої порогу чутливості підсилювача УТ. Струм у реле Р1 знижується до 0, від чого розімкнеться контакт Р1 у ланцюзі РП1. У зв'язку з цим контакт РП1 у ланцюзі розімкнеться. Контакти Р1 (затискачі 7-8, 9-10, 11-12) і перемичка Х1-Х2 дозволяють розширити область застосування вимикача при автоматизації підйомних установок. На мал. також показані: У1 - вирівнювач, що живить транзисторний підсилювач: УТ; Р1 - резистор, що створює постійне навантаження на вирівнювач У2; Др - дросель і конденсатор R1, що утворять фільтри згладжування пульсації в ланцюзі транзисторного підсилювача УТ; для цих же цілей призначений конденсатор R2; Пр1 і Пр2 - плавкі запобіжники.
Високочастотні безконтактні вимикачі ВБВ працюють на принципі зриву коливань генератора високої частоти шляхом екранування його контуру. Екраном є корпус підйомної судини чи спеціальна металева пластина закріплена на ній. При наближенні металевої маси до датчика на відстані 80...100 мм коливання в генераторі зриваються в зв'язку зі зміною умов генерації, і виконавче реле, знеструмивши, своїми контактами викликає включення запобіжного гальма і відключення підйомного двигуна.
Кінцеві вимикачі є надійним захистом від пере підйому при визначених граничних швидкостях судини, тому по ПБ при максимальній швидкості вище 3 м/с для діючих і вище 2 м/с для знову монтованих підйомів застосовують апарати контролю швидкості підходу судин до прийомних площадок.
Обмежувачі швидкості необхідні для того, щоб не допускати перевищення максимальної швидкості більш 15% у порівнянні з розрахункової і підходу підйомної судини до верхньої прийомної площадки зі швидкістю більш 1,5 м/с при транспортуванні вантажів 1 м/с при спуску - підйомі людей. Обмежники швидкості засновані на принципі порівняння заданої і дійсної швидкості підйому.
У ел. запобіжному швидкості з апаратами РОС (мал. 18.7) застосований тахометричний генератор ТГ постійного струму з незалежною обмоткою збудження ОВ, що обертається від підйомного двигуна ПД. Цей генератор є джерелом сигналу дійсної швидкості підйому. В зовнішньому ланцюзі генератора ТГ включені реле контролю швидкості РКС, реле справності цього ланцюга РКЦ, нерегульований резистор R3, реостати Р1 і Р2 відповідно для ходу «вперед» і «назад» і вентилі В1 і В2, необхідні для почергового включення реостатів Р1 і Р2. Опір реостатів Р1 і Р2 у залежності від пройденого судинами шляху змінюється в період уповільненого руху за допомогою контролюючого профілю на профільованому диску. Зміна опору реостатів Р1 і Р2 необхідно для підтримки судин постійного по величині струму в зовнішньому ланцюзі генератора ТГ за умови дотримання розрахункової діаграми швидкості.
При максимальній швидкості підйомів у котушці реле РКС протікає струм, величина якого встановлюється номінальної ЭДС тахогенератора ТГ і сумарним опором його якоря, котушок реле РКЦ і РКС, резистора R3 і цілком введеним опором реостата Р1 і Р2. При перевищенні встановленої максимальної швидкості на 15% у зв'язку зі збільшенням ЭДС генератора, а отже, і струму в його ланцюзі, реле РКС розриває свій контакт у ланцюзі контактора КТП (ланцюг захисту), машина загальмовується запобіжним гальмом, а двигун ПД відключається від мережі.
У період уповільненого руху відбувається пропорційно зниженню швидкості зменшення ЭДС генератора ТГ, але одночасно профільований диск, діючи на повзунка реостата Р1, Р2, забезпечує зменшення його опору на величину, пропорційну шляху пройденому підйомною судиною по прийнятій діаграмі швидкості.
При виконанні в період уповільнення заданої діаграми швидкості струм у ланцюзі реле РКС при виведенні опору реостата Р1, Р2 підтримується приблизно постійним менше струму втягування сердечника реле РКС. При неприпустимому перевищенні швидкості струм у ланцюзі реле РКС збільшується і контакт його розриває ланцюг захисту.
Якщо швидкість транспортування вантажу більше швидкості спуска-підйому людей, то остання контролюється за допомогою реле людської швидкості, включеного послідовно з реле РКС, але набудованого на менший струм, чим реле РКС. Контакт реле людської швидкості в ланцюзі захисту при подачі сигналу про транспортування вантажу шунтується.
При уповільненні чутливість обмежника швидкості зменшується, тому що при низькій швидкості не досягає точне її регулювання, і обмежник може спрацювати. Тому в міру зменшення швидкості опір реостата Р1, Р2 зменшується так, щоб струм у ланцюзі генератора ТГ став трохи менше в порівнянні зі струмом при рівномірному русі. Резистор, що не виключається, R3 необхідний для зменшення нечутливості схеми при малій швидкості (дотягування судин), коли вже всі опори Р1-Р2 виведено. При несправності обмежника швидкості контакт реле РКЦ у ланцюзі захисту залишається розімкнутим, тобто відбувається запобіжне гальмування. При зупиненій машині контакт реле РКЦ шунтується контактом ДО8 контактора останньої ступіні роторного опору двигуна ПД.
Для того щоб реле РКС, контролюючи швидкість тільки під час рівномірного руху й уповільнення, не спрацьовувало в період прискорення, котушка його шунтована блоком-контактом БК1 реверсора і блоку-контакту БК2 реостати Р1, Р2.
При пуску машини котушка реле РКС зашунтована контактами БК1 і БК2. На початку рівномірного руху машини блок-контакт БК2 розмикається: на початку уповільнення він замикається, а контакт БК1 розмикається.
Автоматизовані підйомні установки, згідно ПТЕ, повинні мати дублюючі обмежники швидкості, один з них з незалежним приводом, а другий від регулятора підйому.
Дублюючі запобіжниками швидкості при застосуванні апаратів РОС (мал.18.7) здійснює взаємоконтроль справності своїх ланцюгів за допомогою двохобмотувального реле РКЦ. При несправності кожної з за дубльованих ланцюгів, порушення кінематичних зв'язків з тахогенераторами ТГ1 і ТГ2, поломки кожного і реостатів Р1...Р4 реле РКЦ спрацьовує, викликаючи запобіжне гальмування. Тахогенератор ТГ1 приводиться від вала машини, а ТГ2 - від регулятора підйому.
На мал. 18.8 показана структурна схема ел. обмежника швидкості ЭОС-2, застосовуваного в комплекті з апаратом АЗК.
Обертання від вала підйомної машини 1 передається на дві симетричні частини редуктора 2 апарати АЗК, від якого здійснюється привод сельсинів датчиків 3 і 4 показників глибини, тахогенераторів 5 і 6, шляхових вимикачів 7. На виході тахогенераторів 5 і 6 включені реле контролю обертання 8 і 9.
Передатне відношення редуктора 2 забезпечує поворот роторів сельсинів-датчиків на 50...700 за період розгону підйомної машини. Поблизу від прийомних площадок, де обмежник швидкості контролює мінімальну швидкість, напругу на затискачах обмоток синхронізації сельсинів повинне бути близьким до нуля. В міру віддалення судин від прийомних площадок ця напруга росте пропорційно контрольованої швидкості. Вихідна напруга сельсина-датчика моделюється діод-функціональними перетворювачами 10 і 11, що здійснюють завдання швидкості по необхідному законі і зміна величини, що задається, у необхідних межах. Вихідна напруга перетворювачів 10 і 11 подається на блоки порівняння 12 і 13. На блоки порівняння подається також напруга від тахогенераторів 14 і 15, пропорційно дійсної швидкості. При перевищенні цієї швидкості над заданою в блоках 12 і 13 зникає сигнал, що надходить на вхід виконавчих блоків 16 і 17, від чого вихідне реле розмикає свій контакт у ланцюзі захисту. Блок 18 контролює справність функціональних блоків 10 і 11, а блок 19 призначений для періодичної перевірки справності каналів.
Коли одна з підйомних судин знаходиться поблизу підйомної площадки, напруга в обмотці синхронізації відповідного сельсина 4 відключена шляховим вимикачем 7. Величина контрольованої швидкості визначається напругою елемента блоку, що погодить моделювання, пропорційними мінімальному значенню цієї швидкості. В міру видалення судини від прийомної площадки напруга на затискачах обмотки синхронізації сельсина-датчика 3 росте пропорційно контрольованої швидкості і при повороті ротора його на 50..70º шляховий вимикач відключить порушення сельсина в момент закінчення прискореного руху і включить на вхід блоку моделювання постійну напругу установки 20, що відповідає завданню максимальної швидкості. На початку уповільнення шляховий вимикач відключить постійну напругу і включить обмотку порушення сельсина-датчика 4, ротор якого в цій точці виставлений на кут 50...70º. В міру наближення судини до прийомної площадки напруга на затискачах обмотки синхронізації сельсина 4 знижується пропорційно контрольованої швидкості і поблизу площадки стане близьким до 0, що відповідає мінімальної контрольованої швидкості. При зворотному русі судин робота пристрою аналогічно.
Контрольні питання.
1. Призначення, конструкція АЗК-1. В 1-3
2. Принцип роботи АЗК - 1. В 4-6
3. Покажчики глибини, їхнє призначення, конструкція В 7 - 9
4. Швидкоміри - призначення, принцип дії. В 10-13
5. Апарати захисту, їхнє призначення. В 14-19
6. Принцип роботи апаратів захисту. В 20-23
7. Принцип дії обмежника швидкості РІС. В 24-27
8. Робота обмежника швидкості ЭОС – 2. В 28 – 30
 Мал. 18.1. Структурна схема АЗК-1.
Мал. 18.1. Структурна схема АЗК-1.
Мал. 18.2. Кінетичний вимикач ВМ

 Мал. 18.3. Показник глибини УГС-4.
Мал. 18.3. Показник глибини УГС-4.
Мал. 18.4. Електричний швидко мір.

Мал. 18.5. Схема регулятора підйому. Мал. 18.6. Ланцюг захисту.


Мал. 18.7. Електричні запобіжники швидкості з апаратом РОС.
 Мал. 18.8. Структурна схема електричного запобіжника швидкості ЭОС-2.
Мал. 18.8. Структурна схема електричного запобіжника швидкості ЭОС-2.








