 2014-01-25
2014-01-25 1323
1323«Транспортирующие машины без тягового органа»
К транспортёрам без тягового органа относятся следующие виды машин.
Винтовой транспортёр (шнек).
Винтовые транспортёры служат для перемещения груза в горизонтальном, наклонном и вертикальном направлении. В основном их используют для перемещения сыпучих грузов, но также возможно перемещение штучного груза и жидких продуктов.
Основными конструктивными элементами транспортёра (рис.21) являются шнек 1 (винт), расположенный по оси желоба 2. Насыпной груз подаётся в желоб и при вращении шнека перемещается вдоль желоба, подобно гайке, на вращающемся винте удерживаемой от вращения. Силой удерживающей груз от вращения служит его вес и сила трения о стенки желоба.
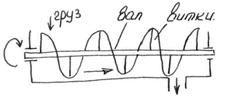
Рисунок 21 – Схема шнекового транспортёра
Шнековые транспортёры обладают простой конструкцией, небольшими габаритами. К недостаткам относят: истирание и дробление перемещаемого груза и самое главное высокий расход энергии который связан со способом перемещения груза (т.е. большие затраты на трение).
В зависимости от конструкции рабочего органа шнеки классифицируются по следующим признакам:
1. Направление навивки:
- левая (если смотреть со стороны выгрузного окна вал вращается против часовой стрелки);
- правая (если смотреть со стороны выгрузного окна вал вращается по часовой стрелки).
2. По количеству витков:
- однозаходные (одна винтовая навивка);
- многозаходные (двух- и трёхзаходные).
3. По форме поверхности витков:
- сплошные (сплошная лента) - применяется для перемещения зернистых, мелкокусковых и порошкообразных грузов;
- ленточные (серпантин) - для корнеплодов, крупнокусковых и слипающихся грузов;
- лопастные (на валу установлены лопатки по винтовой линии и развернут на определённый угол) – для перемещения и перемешивания слёживающихся грузов;
- спиральные – для перемещения гибких шлангах по пространственной траектории.
4. В зависимости от траектории движения груза шнеки бывают:
- тихоходные (горизонтальные);
- быстроходные (вертикальные)
В тихоходных шнеках (рис.22) частица груза совершает колебательное движение (вверх и вниз) с одновременным осевым перемещением вдоль желоба
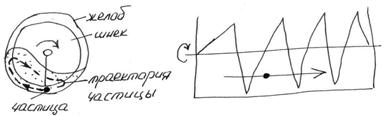 |
Рисунок 22 – Схема траектории движения частицы в тихоходных шнеках
В быстроходных шнеках (рис.23) груз, внутри желоба, размещается под действием центробежной силы концентрично и частицы перемещаются по спирали. Такое перемещение связано с тем что угловая скорость груза меньше угловой скорости винта из-за трения груза о стенки желоба.
 |
Рисунок 23 – Схема траектории движения частицы в быстроходных шнеках
Траектории зависят от частоты вращения шнека. Если при заданной частоте вращении шнека:
m·ω2·R<m·g - шнек тихоходный
m·ω2·R>m·g - шнек быстроходный
где, ω – угловая скорость винта, рад/сек;
R – радиус винта, м.
Расчёт производительности шнека.
Погонная нагрузка равна (рис.24):
 , (кг/м)
, (кг/м)
где, V – объём занимаемый грузом, м3;
D – наружный диаметр шнека, м;
d – диаметр вала шнека, м;
ψ – коэффициент заполнения;
ξ – коэффициент учитывающий угол наклона шнека;
γ – объёмная масса груза, кг/м3.
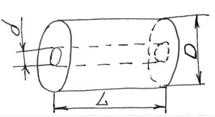 |
Рисунок 24 – Схема к определению погонной нагрузки винтовых транспортёров
Осевая скорость перемещения груза определяется приняв условие, что за один оборот шнека груз перемещается на величину шага между витками (как при вращении гайки):
 (м/сек)
(м/сек)
где, S – шаг шнека, м;
n – частота вращения шнека, об/мин;
60 - коэффициент перевода минут в секунды.
Тогда:
 , (кг/ч)
, (кг/ч)
Гравитационные (самотёчные) транспортёры.
В гравитационных транспортёрах перемещение штучных и сыпучих грузов осуществляется в горизонтальном или вертикальном направлении под действием силы тяжести.
В качестве гравитационного транспортёра для перемещения штучных грузов используют спуски в виде наклонных или винтовых лотков, а также роликовые наклонные или винтовые спуски (рольганги).
Для перемещения сыпучих грузов используют желоба и трубы.
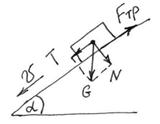 |
Если рассматривать груз на наклонной плоскости (рис.25), то на него действует сила тяжести G=mg. Данную силу можно разложить на две силы G=T+N движение груза по наклонной плоскости происходит под действием силы T=G·Sinα=m·g·Sinα (Sinα – отношение противолежащего катета к гипотенузе).
Рисунок 25 – Схема к расчёту гравитационного транспортёра
Данной силе противодействует сила трения которая равна Fтр=f·N=f·m·g·Cosα где, f – коэффициент трения груза о материал лотка.
Движение груза будет происходить при соблюдении следующего неравенства:
T>Fтр→m·g·Sinα>f·m·g·Cosα→Sinα>f·Cosα→ Sinα/Cosα>f→tgα>f
Так как f=tgφ, где φ – угол трения, то движение груза возможно при условии:
α>φ
Расчёт производительности гравитационных транспортёров.
Производительность спусков при перемещении штучных грузов определяют по формуле:
 (кг/ч)
(кг/ч)
где, G – масса груза, кг;
a – расстояние между грузами (шаг), м;
v – скорость движения груза, м/сек.
Производительность гравитационных транспортёров для сыпучих грузов определяется по формуле:
 (кг/ч)
(кг/ч)
где, F – площадь поперечного сечения груза, м2;
ψ – коэффициент заполнения;
γ – объёмная масса груза, кг/м3.
Сложность заключается в определении скорости движения груза v, так как груз по наклонной плоскости двигается, как правило, с ускорением, то есть скорость не является величиной постоянной.
При спуске груза из т.1 в т.2 совершается работа (рис.26), которая равна приложенной силе на путь:
А=(Т-Fтр)·S
 |
Рисунок 26 – Схема для определения скорости груза
Так же работа равна разности кинетической энергии в т.1 и т.2
Соответственно можно записать:

После сокращения m выразим vK:

 (м/сек)
(м/сек)
Конечная скорость не должна превышать критического значения, при которой может произойти разрушение груза.
В формуле для определения производительности гравитационного транспортёра, при перемещении груза по трубопроводу состоящему из нескольких колен с различным углом наклона, подставляется скорость посчитанная для первого метра последнего прямолинейного участка.








