 2014-01-25
2014-01-25 1366
1366Вывод: плоское движение твёрдого тела – движение сложное. Приняв точку А за полюс заключаем, что оно состоит из двух простых движений – поступательного вместе с полюсом и вращательного вокруг полюса.
Плоским или плоскопараллельным движением твёрдого тела называется такое движение, при котором все точки его движутся в плоскостях параллельных некоторой неподвижной плоскости.
Примеры: качение колеса по рельсу, движение шатуна.
Изучение плоского движения твёрдого тела сводится к изучению движения плоской фигуры в её плоскости.
Рассмотрим движение плоской фигуры из положения 1 в положение 2.
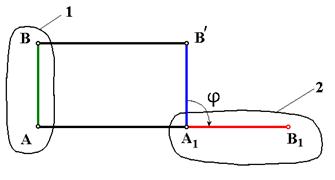
Сначала переместим фигуру из положения 1 поступательно так, чтобы точка А заняла положение А1, а точка В – В/. Чтобы точка В заняла положение В1 необходимо повернуть фигуру вокруг А1 на угол j.
Уравнения движения плоской фигуры.
Пусть плоская фигура движется в своей плоскости относительно неподвижной системы координат OХY.
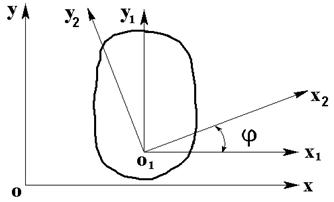
Примем точку О1 за полюс.
Положение плоской фигуры будет однозначно определяться положением точки О1, то есть её координатами и углом j.
Тогда:
 xo1 = f1(t)
xo1 = f1(t)
yo1 = f2(t) - уравнения движения плоской фигуры.
j = f3(t)
Теорема о скорости точки плоской фигуры.
Скорость любой точки плоской фигуры равна геометрической сумме скоростей полюса и вращательной скорости этой точки вокруг полюса.
Доказательство: Пусть плоская фигура движется в её плоскости.
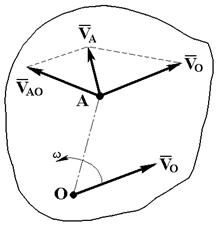
Примем точку О за полюс.
Считаем поступательное движение фигуры вместе с полюсом за переносное, а вращательное вокруг полюса за относительное. Тогда скорость точки А
 , так как переносное движение поступательное, следовательно, переносные скорости всех точек равны скорости полюса.
, так как переносное движение поступательное, следовательно, переносные скорости всех точек равны скорости полюса.
 .
.
на прямую, соединяющую эти точки.
Проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны.
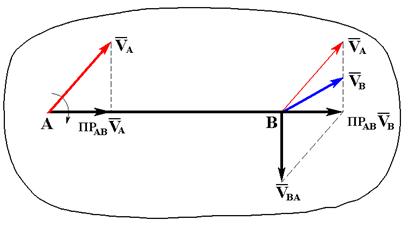

Спроецируем на АВ:

Мгновенный центр скоростей.
Точка, неизменно связанная с плоской фигурой, скорость которой в данный момент равна 0 называется м. ц. с.
Мгновенным центром вращения называется точка неподвижной плоскости, с которой в данный момент совпал м.ц.с.
Определение скоростей точек плоской фигуры с помощью м.ц.с.
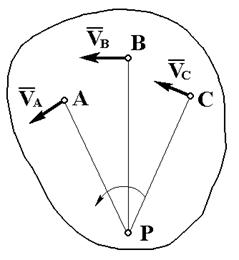
Примем точку Р за полюс, тогда:
но 



Следовательно, скорость любой точки плоской фигуры представляет собой вращательную скорость этой точки вокруг м. ц. с.
Найдём их модули: VA = w . AP; VB = w . BP; VC = w . CP.
Скорость любой точки плоской фигуры по модулю равна произведению угловой скорости фигуры на расстояние от этой точки до м. ц. с. Вектор же скорости направлен перпендикулярно отрезку, соединяющему эту точку с м. ц. с., в сторону вращения.
Установим зависимость между скоростями точек плоской фигуры:


Скорости точек плоской фигуры в каждый момент времени прямо пропорциональны расстояниям от этих точек до м. ц. с.
Способы отыскания м. ц. с.
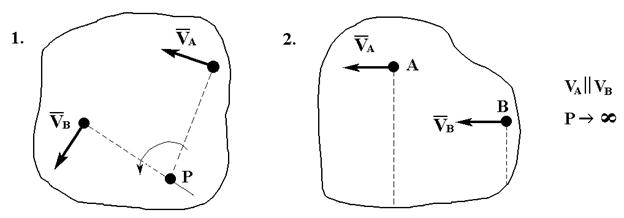
VA > VB
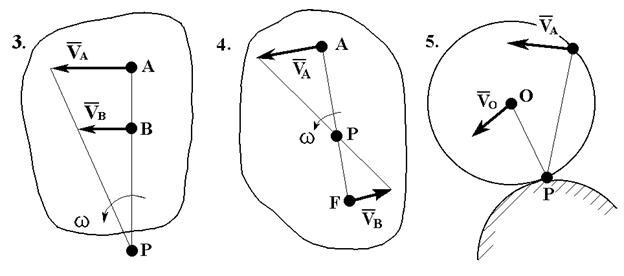
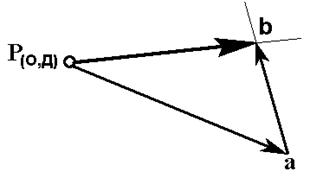
План скоростей.
Скорости точек тела можно определить графически, построением плана скоростей.
Планом скоростей называется диаграмма, на которой отложены векторы скоростей точек тела от некоторого центра, называемого полюсом, в выбранном масштабе.
Полюсобозначается - р.
Пример: Для заданного положения механизма определить скорости точек, если:
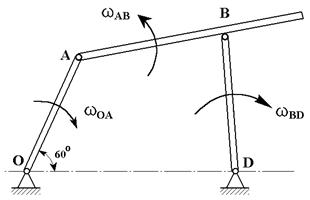
ℓOA = 50 мм; ℓAB = 200 мм;
ℓOД = 100 мм; ℓВД = 150 мм
j = 600; wОА = 60 с-1.
VA = wOA. LOA = 60 . 0,05 = 3 м/c;
VA ^ OA; р - полюс
Масштаб скорости: 
где: Ра – отрезок, изображающий вектор ускорения точки А.
План скоростей:




VД = 0, т.е. Д совпадает с р
VB = bp . mV = 40 . 0,1 = 4,0 м/c;
VBA = ab . mV = 12 . 0,1 = 1,2 м/c;


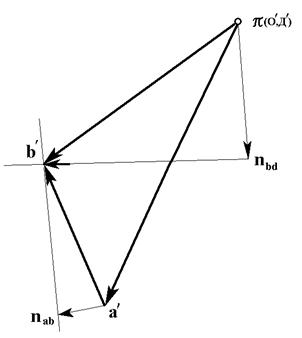
План ускорений:
аAn = 180 м/c2;
 .
.
Определение ускорений точек тела.
При плоском движении точки тела движутся поступательно вместе с полюсом и вращательно вокруг полюса, следовательно, ускорение любой точки складывается из ускорений, которые она получает при поступательном движении и во вращательном движении этого тела, то есть:
Ускорение любой точки тела равно геометрической сумме ускорения полюса и ускорения точки в её вращательном движении вокруг полюса.

Пример:
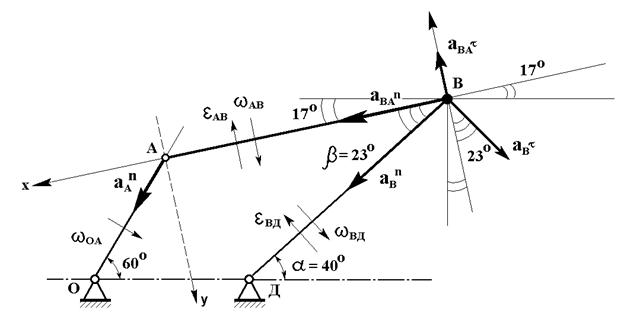
ℓ OA = 0,05 м; ℓ AB = 0,2 м; ℓ BД = 0,15 м.
wОА = 60 с-1; ℓ ОД = 100 мм; j = 600.
аВ –?

 (*)
(*)
aAn = wOA2. ℓOA = 602 . 0,05 = 180 м/c2; cos 670 = 0,39;
cos 230 = 0,92;
aBAn = wAB2 . ℓOA = 602 . 0,05 = 180 м/c2; cos 430 = 0,73;
cos 470 = 0,68;
aBn = wBД2 , ℓВД = 26,72 . 0,15 = 106,93 м/c2
Покажем векторы ускорений. Определяем углы a и b.
Покажем оси X и Y, спроецируем уравнение (*) на оси:
x: -aBt cos 570 + aBn cos 230 = aAn cos 430 + aBAn (1)
y: -aBt cos 230 – aBn cos 670 = - aAt cos 470 + aBAt (2)
Из (1):
Из(2):



