 2014-01-25
2014-01-25 769
769Угловой скоростью вращающегося твердого тела является первая производная от угла поворота по времени
 рад/с, с-1.
рад/с, с-1.
Знак w показывает направление угловой скорости по отношению к направлению угла поворота.
Угловым ускорением вращающегося тела называется первая производная от угловой скорости по времени или вторая производная от угла поворота по времени
 , рад/с2, с-2.
, рад/с2, с-2.
Знак e показывает направление углового ускорения по отношению
к направлению угловой скорости.
Взаимосвязь между углом поворота j, угловой скоростью w и
угловым ускорением e.
dj = w.dt
j - j 0 = w.t → j = j 0 + w.t
dw = e.dt
w - w 0 = e.t → w = w 0 + e.t
dj = (w 0 + e.t)dt = w 0.dt+ e.t.dt
В технике угловая скорость измеряется оборотами в минуту и называется частотой вращения “ n ”.
Установим связь между угловой скоростью w и частотой вращения n
j = 2pn, рад; t = 60 с
2.3. Угловая скорость и угловое ускорение как векторы.
Вектором угловой скорости вращающегося тела называется скользящий вектор, равный по модулю абсолютному значению первой производной от угла поворота по времени и направленный по оси вращения в ту сторону, чтобы, глядя навстречу этому вектору, видеть вращение тела против хода часовой стрелки.
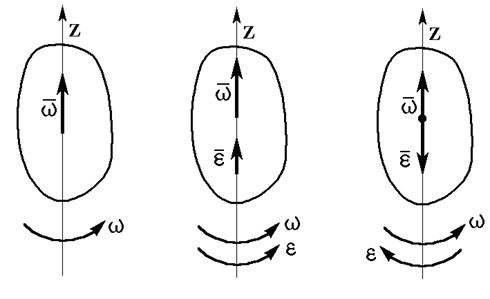
Вектор углового ускорения равен первой производной от вектора угловой скорости по времени и направлен по оси вращения в ту же сторону, что и вектор угловой скорости, если движение ускоренное и в противоположную, если движение замедленное.
2.4. Определение скоростей и ускорений точек вращающегося тела.
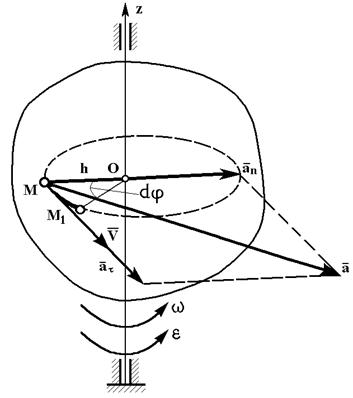
Пусть тело вращается вокруг оси z с угловой скоростью w.
Рассмотрим движение точки “ М ”. При вращении тела она будет двигаться по окружности, центр которой в точке О, радиус h.
За элементарный промежуток времени dt тело повернется на элементарный угол dj, точка М пройдет по окружности элементарный путь dS = ММ1.


Линейная скорость точки вращающегося тела равна произведению угловой скорости тела на расстояние от этой точки до оси вращения.


2.5. Сложное движение точки.
Сложным называется движение точки, при котором она одновременно участвует в двух или нескольких движениях.
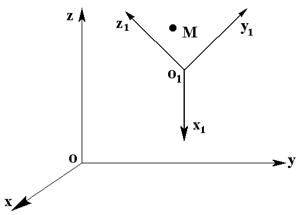 Охуz - неподвижная система осей
Охуz - неподвижная система осей
координат О1х1у1z1 – подвижная система осей координат.
М – движущаяся точка.
Точка движется по отношению к
подвижной системе О1х1у1z1,
которая в свою очередь движется
по отношению к неподвижной системе. Каждая из систем отсчета связана с телом.
Движение точки по отношению к неподвижной системе отсчета называется абсолютным.
Движение точки по отношению к подвижной системе отсчёта называется относительным.
Движение подвижной системы отсчёта по отношению к неподвижной называется переносным.
Скорость точки по отношению к неподвижной системе координат называется абсолютной – Va.
Скорость движущейся точки по отношению к подвижной системе координат называется относительной - Vt.
Переносной скоростью точки называется скорость такой точки, неизменно связанной с подвижной системой координат, с которой в данный момент совпала движущаяся точка – Ve.
Теорема сложения скоростей.








