2018-02-13
2018-02-13 804
804Промышленный робот как объект управления
Промышленный робот как объект управления, представляет собой сложную электромеханическую систему, состоящую из; многозвенной механической конструкции (рабочего механизма); исполнительного устройства; электронной системе управления. Промышленный робот как объект управления, представлен на рис. 2.5, где q1*, q2*,..., qN* -входные сигналы (задающие воздействия), вырабатываемые системами управления; ε1, ε2,.., εN- сигналы рассогласования; u1, u2,...,uN - управляющие сигналы; М1,М2,..., MN - силы и моменты, развиваемые двигателями и поступающие на звенья манипулятора; q1, q2,..., qN - текущие значения относительного положения звеньев манипулятора, обеспечивающих отработку захватным устройством заданных точек траектории.
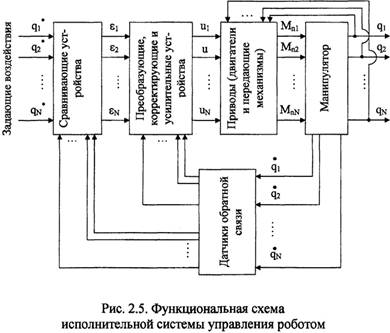
Рабочий механизм промышленного робота непосредственно воздействует на объект или среду. Исполнительное устройство включает совокупность приводов с датчиками обратной связи, усилительными, преобразующими и корректирующими устройствами.
Задача управления промышленным роботом заключается в формировании управляющих воздействий для исполнительных двигателей, отработка которых гарантировала бы прохождение захватным устройством манипулятора пространственной траектории с заданной точностью.
Задача формирования управляющих воздействий сводится к построению программной траектории q (t), т.е. закона изменения вектора относительного положения звеньев манипулятора:

и последующему синтезу собственно закона управления, обеспечивающего устойчивость движения относительно программной траектории.