 2018-02-13
2018-02-13 895
895
Сравнение САУ промышленными роботами осуществляется по следующим характеристикам: типу траектории движения робота; циклу управления; источнику информации для синтеза закона управления; алгоритму управления; способу программирования систем управления, приведенных в табл. 2.1.
Тип траектории движения робота. Цикловые СПУ обеспечивают только дискретную траекторию движения. Каждая ее дискретная точка соответствует одной комбинации из имеющегося общего числа сочетаний крайних положений звеньев манипулятора. Позиционирование в крайнем положении реализуется обычно механическим упором. Главный недостаток дискретности траектории - неполная достижимость точек рабочей зоны робота. Позиционные САУ обеспечивают квазинепрерывную траекторию с возможным позиционированием только в дискретаых значениях непрерывной функции. Число дискретных значений зависит от возможностей управляющего устройства и составляет от нескольких сотен до нескольких тысяч точек. Контурные, адаптивные и интеллектные САУ обеспечивают непрерывные траектории движения, т.е. возможность позиционирования в любой точке рабочей зоны робота. Более того, параметры движения (скорость, ускорение, траектория) можно изменять в процессе перемещения по траектории.
Цикл управления. Цикловые системы управления имеет разомкнутый цикл управления, т.е. сигналы управления поступают из программатора непосредственно на привод робота. В позиционных системах управления цикл управления замкнут по точкам позиционирования и разомкнут для движения между точками позиционирования, которое происходит по заданному закону. В контурных системах управления цикл управления замкнут по внутренней информации о динамическом состоянии звеньев робота, а адаптивные системы управления имеют дополнительные контуры для организации замкнутого цикла по внешней информации о динамическом состоянии среды. Интеллектные системы управления, кроме того, обладают замкнутыми циклами по внутренним и внешним знаниям.
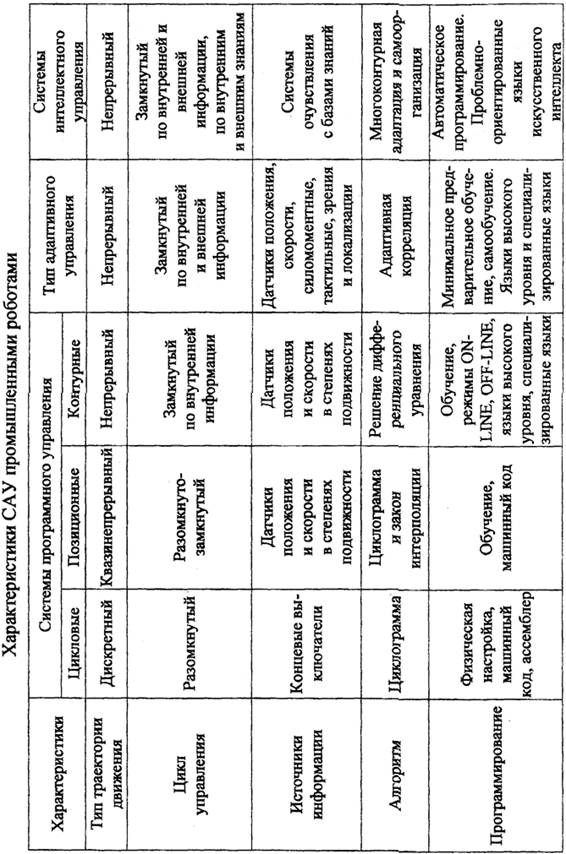
Источники информации. В цикловых системах управления обычно не используются информационные датчики. Исключение составляют концевые выключатели, фиксирующие нахождение звеньев в крайних положениях. В позиционных системах управления каждое звено снабжается обязательно датчиком положения, сигнал которого поступает в устройство сравнения для формирования сигнала рассогласования между заданными и текущими положениями звеньев. В адаптивных системах управления к датчикам внутренней информации добавляются датчики внешнего ответвления, а в интеллектных системах управления средства очувствления объединяются с базами знаний.
Алгоритм управления. В цикловых системах управления алгоритм управления формируется в виде логической последовательности срабатываний звеньев манипулятора. В позиционных системах управления наряду с логической последовательностью движения звеньев существует еще закон интерполяции, определяющий движение между точками позиционирования. В контурных, адаптивных и интеллектных системах управления алгоритм управления синтезируется в результате решения дифференциального уравнения, описывающего динамику робота.
Способ программирования. Цикловые системы управления программируются путем физической настройки механических упоров и ручного набора циклограммы на программаторе. Позиционно-контурные системы управления программируются в режиме непосредственного обучения с использованием языка машинных кодов, либо с применением языков программирования высокого уровня. Также используются специальные языки программирования, учитывающие специфику робота. Для адаптивных и интеллектных систем управления характерны автоматизированные и автоматические способы программирования.








