2018-02-13
2018-02-13 3239
3239
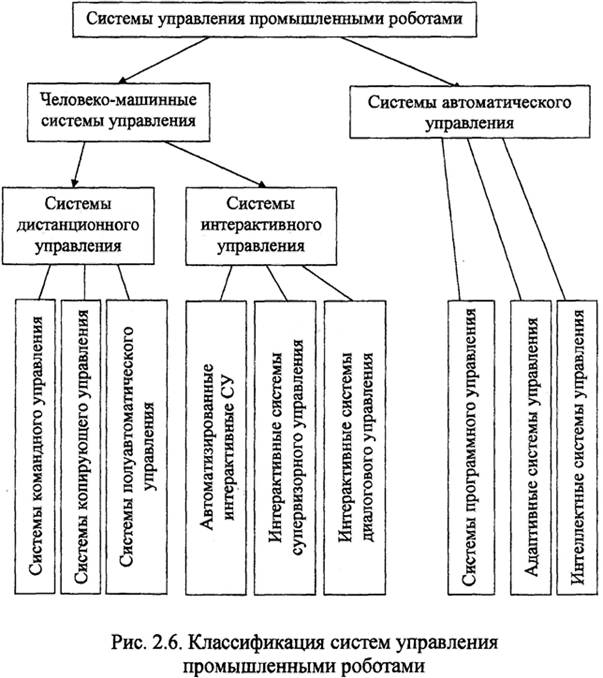
При классификации систем управления промышленными роботами ориентируются на различные признаки, что отражено на рис. 2.6.
По способу управления, определяемому в зависимости от степени участия оператора в системе управления промышленным роботом, системы управления промышленными роботами делятся на:
-человеко-машинные системы управления, имеющие оператора непосредственно в контуре управления;
- САУ, когда оператор остается вне контура управления и взаимодействует с оператором только на этапе обучения. По этому же признаку человеко-машинные системы управления дополнительно делятся на системы дистанционного и интерактивного управления.
По методу управления человеко-машинные системы управления делятся на:
-системы командного управления, в которых оператор включает по отдельности приводы каждого звена робота дистанционно путем нажатия на соответствующие кнопки (тумблеры) пульта управления;
- системы копирующего управления, в которых оператор дистанционно управляет роботом с помощью задающего устройства, кинематически подобного исполнительному устройству робота (движение каждого звена задающего устройства передается на соответствующее звено исполнительного устройства по принципу следящей системы);
-системы полуавтоматического управления, в которых оператор, нажимая на многостепенную управляющую рукоятку, задает желаемое движение захватного устройства, а специализированный вычислитель (ЭВМ) по электрическим сигналам от датчиков рукоятки вычисляет и формирует соответствующие сигналы управления для приводов всех степеней подвижности;
-автоматизированные интерактивные системы управления, в которых только часть операций выполняется автоматически, а остальные предоставляются оператору;
- интерактивные системы супервизорного управления - это системы управления, в которых оператор, наблюдающий по экрану (дисплею) обстановку в месте действия робота, подает отдельные команды-целеуказания, по сигналам от них включаются те или иные программы автоматического действия робота;
-интерактивные системы диалогового управления, отличие которых от систем супервизорного управления состоит в том, что робот выполняет не только команды оператора, но и активно помогает ему в распознавании обстановки и принятии решений.