 2018-02-13
2018-02-13 1492
1492Главная особенность САУ промышленными роботами - это их
автономная работа без непосредственного участия человека. Функции оператора состоят лишь в обучении, запуске и последующем периодическом наблюдении за работой робота.
САУ промышленными роботами делятся на следующие классы.
1. Системы программного управления, основой которых является синтез движения робота по заранее рассчитанной преимущественно жесткой программе. Программа сохраняется в памяти вычислительного устройства и может быть изменена путем перепрограммирования в новом цикле обучения робота. В системах программного управления не предусматривается отработка информации, устраняющая неопределенность характеристик внешней среды, хотя информация о внутреннем фазовом состоянии робота используется в законе управления.
2. Системы адаптивного управления - это системы управления, движение робота в которьгх организуется по гибко изменяемым или корректируемым программам. При этом перестройка программ происходит в ответ на изменение условий внешней среды. Для получения внешней информации адаптивные системы управления обеспечиваются разнообразными средствами очувствления.
3. Системы интеллектного управления - это системы управления, в которых программа движения робота вообще не задается, а синтезируется на основе описания внешней среды, совокупности правил возможного поведения в среде и имеющейся целевой установки задачи. Основное отличие интеллектных систем управления - способность извлекать из данных не только информацию, а еще и знания. Для этой цели системы очувствления дополняются системами понимания (представления знаний).
Закон управления в САУ реализуется в виде программы управления. При этом возможны различные режимы отработки заданной программы. Управление по жесткой программе без ее перестройки в процессе работы. Жесткая отработка программы характерна для роботов перого поколения. Это наиболее простой вид управления, особенно при реализации его на базе разомкнутого цикла управления. В более сложных случаях применяют замкнутый принцип управления. Адаптивное изменение программы в зависимости от условий работы. Наличие системы очувствления позволяет роботу приспосабливаться к не полностью определенной обстановке при выполнении программы, отличает автоматические роботы второго поколения, называемые адаптивными. Формирование управления при отсутствии заданной в явном виде программы. Способность восприятия, распознавания окружающей среды, построение ее модели, принятие решения об изменении поведения при выполнении задания характерны для роботов третьего поколения. Эти роботы называются интеллектными, т.к. они технически воспроизводят отдельные, достаточно сложные интеллектуальные функции, свойственные человеку.
Динамика роботов
При описании динамических свойств робота обычно анализируют отдельно манипулятор, рассматриваемый в качестве механической системы, представляющей собой совокупность звеньев с определенными массоинерционными характеристиками, и приводы робота.
Для получения уравнений динамики используются различные подходы. Рассмотрим динамическую модель манипулятора [4], полученную на основе уравнений Лагранжа П-го рода:

где к = 1, 2,..., N; L = К-П - функция Лагранжа; К - кинетическая энергия системы; П - потенциальная энергия системы; Fk - обобщенная сила, отнесенная к k-му звену; qk - обобщенная координата k-го звена. Опуская сложные выкладки, запишем уравнение динамики работы манипулятора в виде



где Fi - матрица преобразования i-го звена, описывающая его положение в системе координат О0, x0, у0, z0; tr - след матрицы, равный сумме ее диагональных элементов; Hi - матрица инерции i-ro звена; N - число подвижных звеньев; mi - масса i-ro звена; GT - вектор ускорения свободного падения, т.е.

Rц - радиус-вектор центра масс i-ro звена в соответствующей ему системе координат.
Приведенное уравнение показывает сложность управления манипулятором. Однако системы управления роботом разрабатываются не с учетом указанной модели манипулятора, а, в первую очередь, на основе уравнений динамики приводов, которые формируют управляющие воздействия на вход манипулятора с учетом данной модели, получаемой специалистами соответствующего профиля.
Вид уравнений динамического привода, связывающих управляющие воздействия с развиваемыми моментами (усилиями), определяется с учетом нелинейностей привода. В качестве примера рассмотрена линеаризованная модель привода, механическая часть которого считается абсолютно жесткой.
Динамика линеаризованного привода описывается следующей системой уравнений:
-уравнение усилителя привода

где к = l,N; кyk - коэффициент пропорциональности; Аyk(р) - операторный многочлен, характеризующий инерционность усилителя; ωДXk - угловая (или линейная) скорость, зависящая от управляющего воздействия vk(t);
-уравнение двигателя привода

где k = l,N; кДk - коэффициент пропорциональности; ВДк(р) - операторный многочлен, характеризующий инерционность двигателя; MДk(t) -развиваемый двигателем момент (усилие);  - угловые (или линейные) скорости перемещений объекта управления и двигателя по координате qx
- угловые (или линейные) скорости перемещений объекта управления и двигателя по координате qx
- уравнение моментов (усилий) на валу двигателя

где JДk - момент инерции (или масса) перемещающихся частей двигателя; MДk(t) - создаваемый нагрузкой суммарный момент (усилие); MНДk(t) - приведенный к валу двигателя момент (усилие) нагрузки MНk(t);
-уравнение приведенной скорости вала двигателя привода

где ipk - передаточное число редуктора (ipk > 1);
-уравнение приведенного момента (усилия) нагрузки

где

где hk - коэффициент полезного действия редуктора.
Приведенные уравнения справедливы для приводов не только с угловым, но и с линейным перемещением (при замене моментов сил на усилия, а моментов инерции на массы).
Структурная схема линеаризованного привода, соответствующая данной системе уравнений, приведена на рис. 2.7.
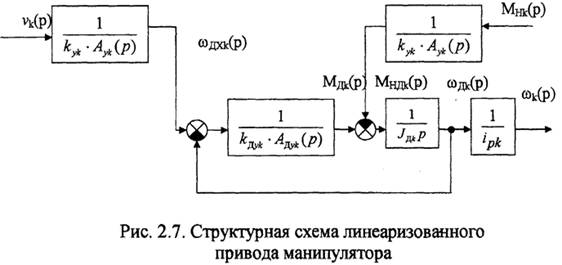
Дифференциальные уравнения привода в операторной форме, связывающие управляющее воздействие vk(t) со скоростью вала нагрузки ωk(t) и с приведенным к валу нагрузки моментом MНk(t), развиваемым двигателем, имеют вид:



Полученные передаточные функции (2.38) и (2.39) используют при моделировании систем управления приводов промышленных роботов.

