 2018-02-14
2018-02-14 629
629Следящим называется регулируемый гидропривод, в котором скорость движения выходного звена изменяется по определенному закону в зависимости от задающего воздействия на звено управления. Выходное звено — это обычно шток гидроцилиндра или вал гидромотора, а звено управления — устройство, на которое подается управляющий сигнал.
В большинстве случаев использования следящего гидропривода к функциям слежения добавляются также функции усиления управляющего сигнала по мощности, поэтому следящий гидропривод часто называют гидроусилителем. Гидравлические усилители применяют в тех случаях, когда непосредственное ручное управление той или иной машиной является для человека непосильным (на самолетах, кораблях, тяжелых автомобилях и тракторах, строительно-дорожных и других машинах, а также в системах гидроавтоматики металлорежущих станков).
Схема простейшего гидравлического усилителя, на примере поперечной подачи суппорта копировального токарного станка показана на рис. 3.110.
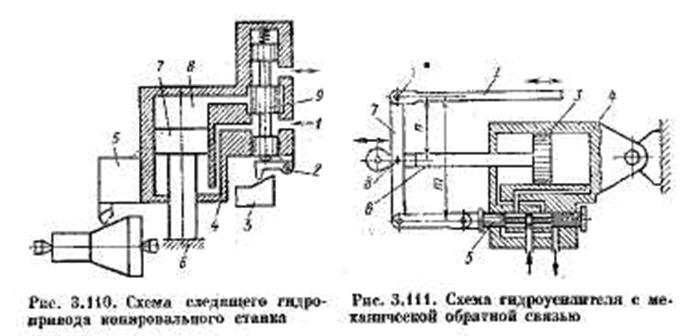
Суппорт 5 объединен с выходным звеном гидропривода — подвижным корпусом 4 гидроцилиндра, в котором размещено также звено управления — золотниковый гидрораспределитель 9. Поршень 7 гидроцилиндра закреплен па корпусе 6 суппорта. При продольной подаче суппорта щуп 2 скользит по копиру 3 и смещает гидрораспределитель, который открывает доступ жидкости из подводящей гидролинии 1 в большую полость 8 гидроцилиндра. Это вызывает смещение корпуса 4 с закрепленным па нем резцом, повторяющее смещение гидрораспределителя. При этом щель, соединявшая полость 8 с подводом 1 перекрывается, чем осуществляется прямая обратная связь выходного и задающего звеньев. Она восстанавливает равновесие в системе после исполнения управляющего сигнала. Непрерывное протекание процессов рассогласования и восстановления представляет слежение выходного звена за командой задающего.
Схема широко распространенного гидроусилителя с рычажной связью между звеньями показана на рис. 3.111. В нем выходному звену, штоку 6, сообщаются движения, согласованные с определенной точностью с перемещением звена управления, тяги 2, при требуемом усилении входной мощности.
Для обеспечения слежения выходного звена 6 за перемещением звена управления 2 обычно применяют отрицательную обратную связь, передающую движения выходного звена на звено управления для умеыьшения управляющего сигнала. Действие этой связи сводится к тому, что движение звена управления в сторону открытия расходных окон распределителя 5 вызывает движение выходного звена, направленное на их закрытие.








