 2020-01-14
2020-01-14 304
304Прямоугольная система координат.
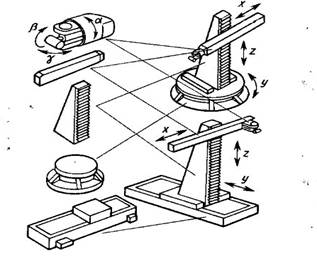
В прямоугольной (декартовой) системе координат звенья механической системы имеют прямолинейные перемещения по трем (или двум - при плоской системе) взаимно перпендикулярным осям X, Y, Z. Рабочая зона промышленных роботов имеет форму прямоугольника или параллелепипеда
Modular Robot (фирма Sciaky)
Предназначен для комплектации поточных линий сварки при массовом производстве автомобильных кузовов.
Паспортные данные



Кинематическая схема робота
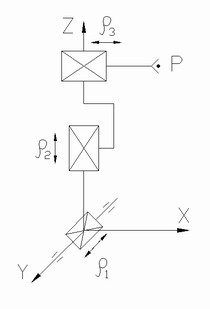
Для приведения реальной кинематической схемы робота к расчетной,
исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата, т.е. замораживаем угловые перемещения.
Проведем расчет ускорений по формулам:

| Параметры | ρ1 | ρ2 | ρ3 | |||
| qimin | 0,60 | м | 1,00 | м | 0,70 | м |
| qimax | 1,40 | м | 1,80 | м | 1,90 | м |
| q`imax | 0,50 | м/c | 0,42 | м/c | 0,33 | м/c |
| КТР | 0,10 | 0,10 | 0,10 | |||
| q``imax | 2,00 | м/с2 | 1,41 | м/с2 | 1,31 | м/с2 |
Цилиндрическая система координат
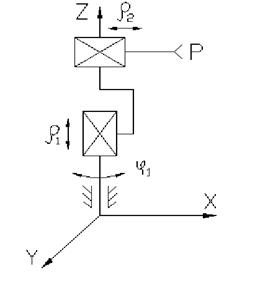
Цилиндрическая система координат характеризуется перемещением рабочего органа промышленного робота в основной координатной плоскости в направлениях r и φ, а также по координате Z. Рабочая зона в этом случае имеет форму цилиндра, размеры H, L и угол φ определяют ее параметры.
AL-400S

Паспортные данные:


Механизм осуществления перемещения по координатам:
φ1: Поворот колонны осуществляется двумя пневматическим цилиндром через пару цепных передач, работающих параллельно.
ρ1: Каретка, несущая выдвижную руку, перемещается в вертикальном направлении по основной направляющей, установленной внутри поворотной колонны. Дополнительными направляющими являются штоки двух пневматическим цилиндром, на которых жестко закреплена каретка.
ρ2: Выдвижение руки осуществляется пневматическим цилиндром по направляющей, которой является шток цилиндра, на котором жестко закреплена кисть робота.
Кинематическая схема робота
Для приведения реальной кинематической схемы робота к расчетной исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата. Т.е. не учитываем при кинематическом расчете перемещение по координатам α, γ.
Проведем расчет ускорений по формулам:

| Параметры | φ1 | ρ2 | ρ3 | |||
| qimin | -1,05 | рад | 0,90 | м | 0,50 | м |
| qimax | 1,05 | рад | 1,05 | м | 0,80 | м |
| q`imax | 1,05 | рад/c | 0,50 | м/c | 0,50 | м/c |
| КТР | 0,20 | 0,30 | 0,20 | |||
| q``imax | 2,63 | рад/с2 | 5,56 | м/с2 | 4,17 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата=(0.5  1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
1.5)mгр m3=m3’+ mориент+ mсхвата+ mгруза
mоснования=(0.2 0.5)M∑ mi=dSl∑
mориент=n*mгр (0.5 1.5) Mr∑=m1 + m2+ m3 + mоснования
 =
=  d=7800кг/м3
d=7800кг/м3
| mгруза | 5 | кг | mсхвата | 5 | кг |
| M∑ | 250 | кг | mоснования | 50 | кг |
| n | 0 | mориент | 0 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l∑ (м) | 0.5 | 0.42 | 0.48 |
| Kзаполнения =(0.1 0.5)
| 0.1 | 0.2 | 0.2 |
| Sсеч (м2) | 0.2 | 0.05 | 0.016 |
| mi (кг) | 156 | 32.7 | 19.8 |
Mr∑=258.6кг









