 2020-01-14
2020-01-14 306
306
В соответствии с требуемыми условиями производственного процесса кинематические звенья и захватное устройство промышленного робота (ПР) должны перемещаться в пространстве по заданным траекториям. Такое перемещение в автоматическом режиме осуществляется в современных роботах с помощью системы управления, которая представляет собой сложный взаимосвязанный комплекс следящих систем управления положением звеньев манипулятора – следящих приводов. Каждый привод управляется определенной степенью подвижности манипулятора.
В общем случае, структура отдельной следящей системы промышленного робота (ССПР) может быть представлена функциональной схемой, изображённой на рисунке 1.1.
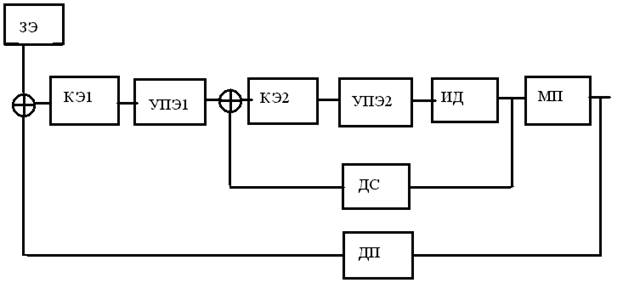
Рисунок 1.1 –Функциональная схема электрической ССПР.
На рисунке приняты такие обозначения:
ЗЭ – задающий элемент, формирующий задающие воздействие по угловому положению;
КЭ1, КЭ2 – корректирующие элементы;
УПЭ1, УПЭ2 – усилительно-преобразующие элементы;
ИД – исполнительный двигатель;
СЭ1, СЭ2 – сравнивающие элементы;
МВН(t) – момент внешних сил;
q(t) – реальное угловое положение звена.
Задающий элемент ЗЭ формирует информацию о требуемых траекториях перемещения звеньев манипулятора и захватного устройства. Корректирующий элемент КЭ1 и усилительно-преобразующий УПЭ1 совместно выполняют функцию регулятора положения, характеристика которого может перестраиваться с целью достижения требуемых динамических качеств. Усилительно-преобразующий элемент УПЭ2 является усилителем мощности, совместно УПЭ2 и корректирующий элемент КЭ2 выполняют функцию регулятора скорости, от их выбора существенно зависят динамические характеристики ССПР. Остальные элементы следящей системы: электродвигатель ИД, датчик скорости ДС, датчик положения ДП, редуктор МП конструктивно входят в состав исполнительного органа манипулятора и являются неизменяемой частью системы, поскольку не могут быть изменены в процессе настройки ССПР. Как видно из рисунка, функциональная схема содержит два контура регулирования: подчинённый контур регулирования скорости двигателя (сервопривод) и контур регулирования углового или линейного положения (следящий привод).
Следящие системы ПР определяют важнейшие технические характеристики работы, в частности, его точность и быстродействие. В комплексе работы всех следящих систем ПР должна обеспечивать минимальное значение погрешности позиционирования захватного устройства манипулятора при максимально возможном быстродействии. При этом также необходимо обеспечить апериодичность процессов управления, т.к. перерегулирование в следящих системах, приводящее к «перебегу» заданных траекторий, могут привести к аварийным ситуациям. Будем рассматривать следящую систему промышленного робота, в которой в качестве исполнительного двигателя используется двигатель постоянного тока с независимым возбуждением. В качестве функциональных элементов ССПР используются следующие устройства: усилителем мощности является тиристорный преобразователь, измерителем скорости – тахогенератор постоянного тока, измеритель углового положения – потенциометрический датчик, корректирующие устройства регуляторов скорости и положения выбираются в процессе расчёта следящей системы.








