2020-01-14
2020-01-14 167
167
В данном пункте курсовой работы стоит задача получить математическое описание двигателя постоянного тока. Структурная схема двигателя постоянного тока представлена на рисунке 3.1.

 Мс(s)
Мс(s)

Рисунок 2.1 - Структурная схема двигателя постоянного тока
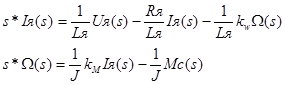
С учетом обозначения сигналов на функциональной схеме, во временной области математические модели можно записать следующим образом:
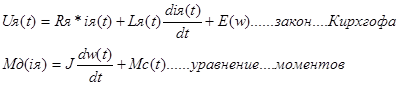
где ω – угловая скорость вращения вала двигателя;
J – момент инерции всех вращающихся частей;
E(w) – ЭДС;
Mс - момент сопротивления на валу двигателя
Mд – вращающий момент (динамический момент сил)
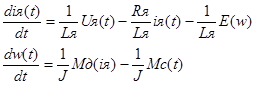
Разрешим каждое из уравнений относительно производных: выражаем производные и получаем систему дифференциальных уравнений:
Так как Мд и E(w) являются нелинейными, то необходимо выполнить линеаризацию. Принимая i=iя0; U=Uяo; w=wo; Mc=Mco;
Раскладываем в ряд Тейлора и получаем:
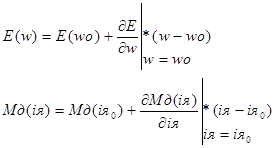
Получаем:
 (1)
(1)
Так как в установившемся режиме все производные равны нулю, то можем переписать систему в следующем виде:
 (2)
(2)
Обозначим, что:
Теперь, чтоб получить линеаризованную модель, почленно вычитаем из (1) (2):
Считая отклонения ΔUя, Δiя, Δw малыми величинами, можно записать:
Применяя преобразование Лапласа, можно получить данную систему уравнений в операторной форме:
 (3)
(3)
Теперь получим выражения для передаточных функций W4, W5, W6 в операторной форме. Введем обозначения:
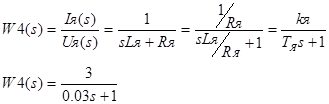
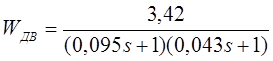
Тогда получаем выражение для передаточной функции W4(s) и в соответствии с вариантом задания записываем её вид:
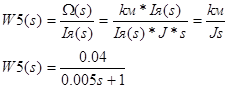
Передаточная функция W5(s) получается из второго уравнения (3):
Передаточная функция W6(s):
Теперь, принимая во внимание момент Mc.
Найдем передаточную функцию Wc c помощью второго уравнения (3): принимая ток якоря =0
Теперь можно получить выражение для передаточной функции двигателя по управлению.
Приводим к виду:


Находим корни характеристического полинома: S1=-10,5 S2=-22,8
Можно сделать вывод, что т.к. корни оба левые, то полином устойчив.
Структурная схема системы в целом будет иметь вид, представленный на рисунке 4.1:
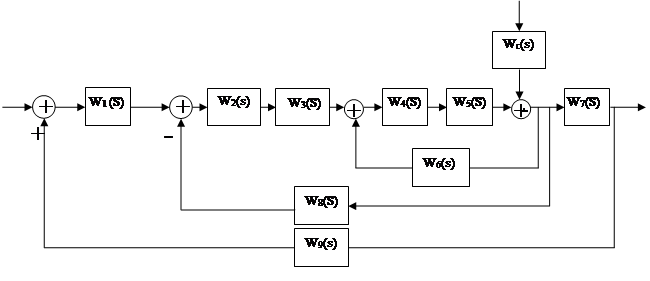
Рисунок 2.2 – Структурная схема всей системы в целом
Здесь на схеме указаны следующие передаточные функции:
W1(s) = k – коэффициент усиления по параметру положения;
W2(s) - передаточная функция корректирующего звена;
W3(s) - передаточная функция усилителя-преобразователя (блок УПЭ2 на рисунке 2.1);
W4(s), W5(s), W6(s) - передаточная функция двигателя постоянного тока (блок ИД);
W7(s) – передаточная функция механической передачи (блок МП);
W8(s) - передаточная функция измерителя скорости (блок ДС);
W9(s) - передаточная функция датчика углового положения (блок ДП).
W3(s) = Кп = 4
W7(s) = 1/ (60*s)
W8(s) = Ктг = 0,07
W9(s) = Кос = 1
Формулы для остальных передаточных функций, фигурирующих в данной схеме, записаны выше.