 2020-04-07
2020-04-07 605
605Рассмотрим функциональную схему командной системы телеуправления первого вида в вертикальной плоскости (рис. 1.6). Наведение в горизонтальной плоскости осуществляется аналогично.
Измерение координат цели и ЛА в общем случае осуществляется станцией наведения с некоторыми ошибками. Поэтому на рис. 1.6 обозначения  соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА.
соответствуют действительным, а с индексом “и“ - измеренным значениям координат цели и ЛА.
В блоке формирования ошибки (БФО) наведения вычисляется линейное отклонение ЛА в вертикальной плоскости  и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления
и этот сигнал поступает на вход блока формирования команды (БФК) управления, с выхода которого команда управления  поступает на вход командной радиолинии управления. Команда
поступает на вход командной радиолинии управления. Команда  по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости.
по линии радиоуправления поступает на вход системы стабилизации ЛА в вертикальной плоскости.
Система стабилизации формирует электрический сигнал, который поступает на рулевой привод. Рулевой привод изменяет угловое положение рулей высоты. На рулевых поверхностях возникает дополнительная подъемная сила, которая вызывает вращение ЛА вокруг поперечной оси. Изменение углового положения ЛА приводит к изменению аэродинамических сил, действующих на ЛА, и как следствие, параметров движения ЛА.
РЛС определяет координаты местоположения ЛА  и измеренные величины
и измеренные величины  поступают в блок формирования ошибки наведения.
поступают в блок формирования ошибки наведения.
Локатор цели, локатор ЛА и командная радиолиния управления подвержены воздействию различных помех, что отображено на схеме возмущениями  . Возмущения, действующие на ЛА, показаны в виде возмущения
. Возмущения, действующие на ЛА, показаны в виде возмущения  .
.
Структурная схема.
Рассмотрим структурную схему командной системы телеуправления первого вид при наведении в вертикальной плоскости (рис. 1.7).
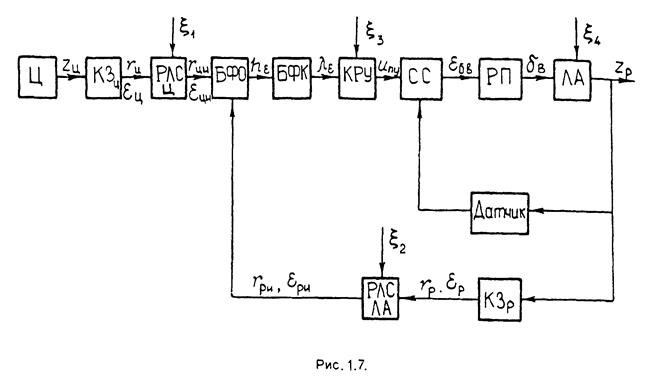
На рисунке введены следующие новые обозначения:
КЗ - кинематическое звено, которое определяет связь между параметрами движения ЛА (скорость, координаты центра масс, угол тангажа, угол наклона траектории и др.), которые на рис. 1.7 обозначены в виде вектора  , и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места
, и теми величинами, которые могут измерять станции наблюдения (в данном случае угол места  и наклонная дальность
и наклонная дальность  );
);
РП - рулевой привод ЛА;
СС - система стабилизации ЛА в вертикальной плоскости.
На основе команды управления и измеренных параметров движения система стабилизации формирует электрический сигнал, который поступает на вход рулевого привода. РП изменяет угловое положение рулей высоты  , что приводит к изменению параметров движения ЛА (изменению вектора
, что приводит к изменению параметров движения ЛА (изменению вектора  ). Составляющие вектора не могут быть непосредственно измерены РЛС, поэтому на схеме введено КЗ. По той же причине на схеме введено кинематическое звено для цели - КЗц.
). Составляющие вектора не могут быть непосредственно измерены РЛС, поэтому на схеме введено КЗ. По той же причине на схеме введено кинематическое звено для цели - КЗц.
Ошибка наведения , на основе которой формируется команда управления, определяется формулой (1.7).
Рисунок 1.7 наглядно показывает, что система телеуправления является замкнутой автоматической системой, причем цель, а следовательно, и система измерения координат цели (локатор цели) не входят в замкнутый контур. Движение цели является внешним входным воздействием для контура наведения ЛА: возмущения  учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.
учитывают воздействия различных помех на локатор цели, локатор ЛА, командную радиолинию и ЛА.
Для выбора параметров системы наведения, обеспечивающих устойчивость, требуемое качество и точность наведения, необходимо на основе структурной схемы составить математическую модель системы наведения, учитывающую принятый метод наведения, используемый набор измерительных средств, особенности управления ЛА, действующие возмущения и другие факторы.
Составление математической модели системы наведения предполагает наличие математических моделей элементов, входящих в эту систему. Математические модели элементов системы телеуправления рассмотрены в следующей главе.








