 2020-04-07
2020-04-07 306
306Рассмотрим пример синтеза системы с параметрической адаптацией. Сформулируем задачу синтеза для объекта управления, который задан моделью в пространстве состояний
 (3.25)
(3.25)
где x Î Rn, u Î Rm – векторы состояния и входа ОУ,  ,
,  – матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь, что значения коэффициентов ограничены по модулю, т.е.
– матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь, что значения коэффициентов ограничены по модулю, т.е.
 для всех i, j, r, p.
для всех i, j, r, p.
Уравнение эталонной модели выбрано в форме
 (3.26)
(3.26)
где r Î Rm – задающее воздействие, Ам – гурвицева матрица. Цель управления сформулирована относительно координатного рассогласования
 (3.27)
(3.27)
где e(t)=x(t)–xм(t). Предполагаем, для объекта (3.25) выполняются условия управляемости и наблюдаемости координат состояния. Пусть целевая функция имеет вид квадратичной формы
 (3.28)
(3.28)
Поставленная цель управления выполняется, если Q®0 при t®¥.
Синтез адаптивного регулятора начнем с определения уравнения основного контура. Допустим, что  , тогда справедливо равенство
, тогда справедливо равенство  . Вычтем (3.26) из уравнения (3.25):
. Вычтем (3.26) из уравнения (3.25):

затем разрешим полученное уравнение относительно u (t):

или  . (3.29)
. (3.29)
“Идеальное” управление можно записать в форме
 (3.30)
(3.30)
где матрицы k*x, k*r удовлетворяют условию


 . (3.31)
. (3.31)
Матрицы идеальных значений коэффициентов регулятора k*x, k*r существуют, если выполняются ранговые условия

Реальный закон управления имеет вид
 (3.32)
(3.32)
где kx (t), kr (t) – матрицы настраиваемых коэффициентов регулятора, 
Для определения вида алгоритма адаптации требуется вычислить производную целевого функционала в силу уравнений системы, т.е.
 (3.33)
(3.33)
После подстановки (3.32) в (3.33) имеем

 (3.34)
(3.34)
Определим скоростные градиенты


Для алгоритмов настройки коэффициентов выбираем АСГ в дифференциальной форме
 (3.35)
(3.35)
где Г = g I, g > 0.
Система (3.25), (3.26), (3.32), (3.35) относится к системам с параметрической адаптацией. На основе АСГ можно синтезировать также системы с сигнальной и сигнально-параметрической адаптацией. Структурная схема системы изображена на рис. 3.10, где использованы обозначения:  ,
,  , x1 = xм, k1 = kr, k = kx, A1 = BT H.
, x1 = xм, k1 = kr, k = kx, A1 = BT H.
Системы с алгоритмом адаптации (3.35) сохраняют работоспособность при изменении координатных и параметрических возмущений в широких пределах. Качество процессов ухудшается, если скорость изменения параметрических возмущений высокая. С целью повышения быстродействия в контурах параметрической настройки коэффициентов регулятора можно применять пропорционально- интегральные алгоритмы адаптации в конечно- дифференциальной форме

 (3.36)
(3.36)
В рассмотренной последовательности синтеза адаптивного регулятора можно выделить следующие этапы:
1. Задание функции цели,
2. Определение уравнения контура модель-объект при x = xм,
3. Определение «идеального» закона управления,
4. Определение условия существования идеальных коэффициентов регулятора (рангового условия),
5. Нахождение реального закона управления, введение настраиваемых коэффициентов,
6. Определение градиента целевой функции,
7. Определение алгоритма адаптации в дифференциальной форме,
8. Определение алгоритма адаптации в конечно-дифференциальной форме.
Замечание: В алгоритмы (3.35), (3.36) входят элементы матрицы коэффициентов объекта В, которые, в общем случае, неизвестны. Если эталонная модель достаточно точно описывает объект в номинальном режиме работы, то в алгоритм адаптации вместо В можно использовать Вм.
Пример 3.2. Проведем синтез адаптивного регулятора для объекта, рассмотренного в примере 3.1. Уравнение эталонной модели (3.20) запишем в виде
 (3.37)
(3.37)
здесь yм - выходная переменная bом = aом = 2, т.е. эталонная динамика системы формируется динамическим звеном (3.37). Если рассогласование по выходным переменным задать выражением
 (3.38)
(3.38)
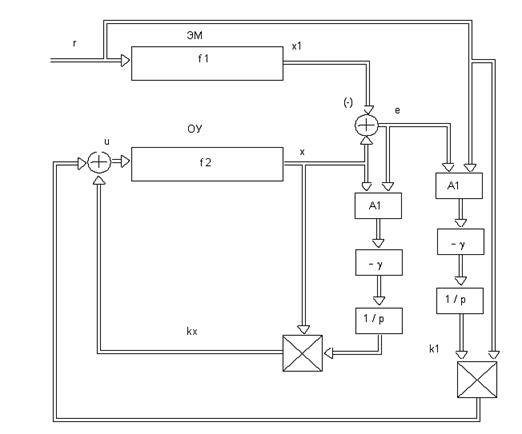
Рис. 3.10. Структурная схема адаптивной системы управления
то функцию качества (3.28) можно записать следующим образом
 (3.39)
(3.39)
Уравнение регулятора (3.32) с учетом модели объекта (3.37) имеет вид
 (3.40)
(3.40)
где ky, kr - настраиваемые коэффициенты. Тогда полная производная функции (3.39) есть
 (3.41)
(3.41)
а частные производные функции (3.41) по настраиваемым коэффициентам
 .
.
Алгоритм настройки коэффициентов регулятора с учетом (3.40) и (3.23) получим в виде
 . (3.42)
. (3.42)
Структурная схема системы (3.19), (3.37), (3.40), (3.42) приведена на рис. 3.11 (использованы обозначения 

 ).
).
Процессы в системе с постоянными параметрическими возмущениями и коэффициентом передачи адаптора  =50 приведены на рис. 3.12, а с переменными параметрическими возмущениями (
=50 приведены на рис. 3.12, а с переменными параметрическими возмущениями ( ) и =30 - на рис. 3.13.
) и =30 - на рис. 3.13.








