 2020-04-07
2020-04-07 562
562Второй метод Ляпунова был разработан для исследования устойчивости движения нелинейных систем, которые описываются обыкновенными дифференциальными уравнениями.
Впоследствии метод стали использовать для оценивания быстродействия системы. Примерно в 70-е годы прошлого столетия метод нашел применение в задачах синтеза адаптивных регуляторов. Термины «функция Ляпунова» и «прямой метод Ляпунова» введены Н.Г. Четаевым в 1946 г.
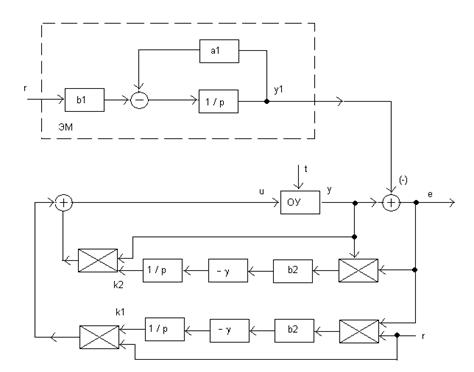
Рис. 3.11. Структурная схема адаптивной системы управления (пример 3.2)
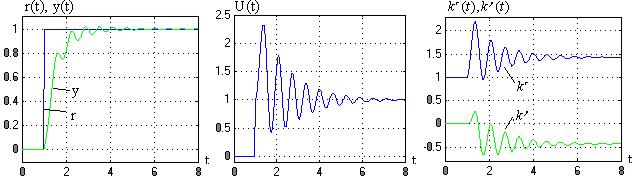
Рис. 3.12. Процессы в системе с постоянными параметрическими возмущениями и коэффициентом передачи адаптора  =50
=50
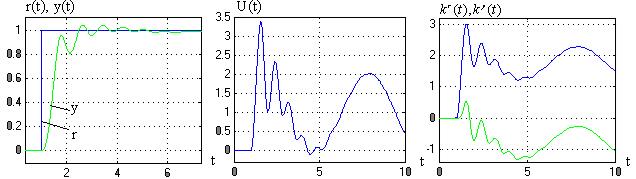
Рис. 3.13. роцессы в системе с переменными параметрическими возмущениями и коэффициентом передачи адаптора  =30
=30
Рассмотрим синтез адаптивных регуляторов методом функций Ляпунова для линейного объекта управления, модель которого имеет вид (3.25)

где х Î Rn – вектор состояния, u Î Rm – вектор управления, n ≥ m; A, B – неизвестные матрицы параметров объекта управления, dim A = n x n, dimB = n x m,  ,
,  . Коэффициенты матриц А, В заранее не известны. Известно лишь, что значения коэффициентов ограничены, т.е.
. Коэффициенты матриц А, В заранее не известны. Известно лишь, что значения коэффициентов ограничены, т.е.
 для всех i, j, r, p.
для всех i, j, r, p.
Вектор состояния считается доступным измерению, поэтому y = x, y – вектор выходных переменных.
Желаемая динамика задаётся эталонной моделью вида (3.26)

где хм Î Rn – вектор состояния эталонной модели, r Î Rm – вектор задающих воздействий. Выбор эталонной модели зависит от требований, предъявляемых к замкнутой системе (времени переходного процесса, перерегулирования, астатизма и т.д.). Эталонная модель должна быть устойчивой, т.е. матрица коэффициентов Ам – гурвицева, поэтому уравнение det (pI – Aм) = 0 имеет все корни с отрицательной вещественной частью, I – единичная матрица соответствующей размерности; Вм – матрица полного ранга.
Цель функционирования системы зададим предельным уравнением (3.27)

где e(t) – ошибка системы.








