 2020-04-07
2020-04-07 243
243Общий подход к последовательности синтеза системы градиентным методом рассмотрим на примере скалярного объекта первого порядка:
 .
.
Эталонной модели можно поставить в соответствие уравнение вида
 ,
,
где  . Обозначим рассогласование между
. Обозначим рассогласование между  и
и  через e:
через e:  . Цель функционирования системы можно задать асимптотическим выражением:
. Цель функционирования системы можно задать асимптотическим выражением:  при
при  . Используя известные методы синтеза, например, метод эталонного уравнения, закон управления получим в виде:
. Используя известные методы синтеза, например, метод эталонного уравнения, закон управления получим в виде:
 ,
,
где  – настраиваемый коэффициент регулятора. После подстановки закона управления в уравнение объекта управления получим уравнение обобщенного настраиваемого объекта
– настраиваемый коэффициент регулятора. После подстановки закона управления в уравнение объекта управления получим уравнение обобщенного настраиваемого объекта
 .
.
Достижение поставленной цели управления можно анализировать с помощью функции цели  , если
, если  при
при  , то
, то  , что и требуется по условию задачи. В соответствии с градиентным методом алгоритм адаптации запишем в виде
, что и требуется по условию задачи. В соответствии с градиентным методом алгоритм адаптации запишем в виде
 или
или  ,
,
где φ – функция чувствительности. Данный алгоритм обеспечивает изменение настраиваемого коэффициента в каждый текущий момент времени, направленное на минимизацию функции цели. Принимая во внимание, что  , функция чувствительности может быть определена через передаточную функцию. Основная трудность при синтезе таких алгоритмов заключается в определении φ, так как закон изменения параметров объекта не известен. В случае, когда система и модель операторно тождественны, то φ можно получить, используя оператор (передаточную функцию) эталонной модели. Но при этом исключается возможность выбора ЭМ в виде динамического звена меньшего порядка по сравнению с объектом управления. В частном случае уравнение адаптора может иметь вид:
, функция чувствительности может быть определена через передаточную функцию. Основная трудность при синтезе таких алгоритмов заключается в определении φ, так как закон изменения параметров объекта не известен. В случае, когда система и модель операторно тождественны, то φ можно получить, используя оператор (передаточную функцию) эталонной модели. Но при этом исключается возможность выбора ЭМ в виде динамического звена меньшего порядка по сравнению с объектом управления. В частном случае уравнение адаптора может иметь вид:
 .
.
Объект управления, эталонная модель, регулятор и адаптор образуют адаптивную систему. Процессы, наблюдаемые в замкнутой системе при отработке постоянного входного воздействия единичной амплитуды и  , приведены на рис. 3.3 и 3.4. Выходной сигнал достигает заданного эталонного значения после окончания переходного процесса. Точность в установившемся процессе выше в системе со стационарным объектом (рис. 3.3).
, приведены на рис. 3.3 и 3.4. Выходной сигнал достигает заданного эталонного значения после окончания переходного процесса. Точность в установившемся процессе выше в системе со стационарным объектом (рис. 3.3).
Моделирование выполнено при коэффициенте передачи равном -  =60 и начальном условии в адапторе - k(0) =1. Для парирования переменного параметрического возмущения (рис. 3.4), которое задавалось функцией вида
=60 и начальном условии в адапторе - k(0) =1. Для парирования переменного параметрического возмущения (рис. 3.4), которое задавалось функцией вида  , потребовалось большее значение коэффициента передачи адаптора: =80, начальные условия в контуре настройки те же, что и в предыдущем случае: k(0) =1. В зависимости от свойств возмущения на выходах регулятора и адаптора в установившемся режиме наблюдаются либо постоянные значения, либо колебания соответствующих переменных (рис. 3.3, 3.4).
, потребовалось большее значение коэффициента передачи адаптора: =80, начальные условия в контуре настройки те же, что и в предыдущем случае: k(0) =1. В зависимости от свойств возмущения на выходах регулятора и адаптора в установившемся режиме наблюдаются либо постоянные значения, либо колебания соответствующих переменных (рис. 3.3, 3.4).
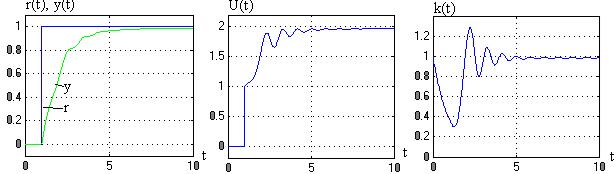
Рис. 3.3. Отработка постоянного входного воздействия единичной амплитуды со стационарным объектом
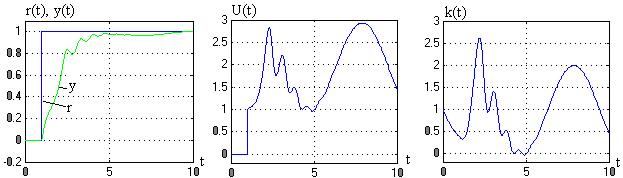
Рис.3.4. отработке постоянного входного воздействия единичной амплитуды с нестационарным объектом








