 2020-04-07
2020-04-07 477
477Для анализа наиболее общего случая рассмотрим ускоренное движение автомобиля-тягача на подъем с углом крутизны a (рис. 16). Принято допущение, что автомобиль симметричен относительно продольной оси и дорожное покрытие под всеми колесами одинаковое. Это позволяет анализировать ситуацию на плоской расчетной схеме.

Рис.16. Силы и моменты, действующие на автомобиль-тягач
при прямолинейном ускоренном движении на подъем
Всю совокупность силовых факторов в рассматриваемой ситуации можно разделить на такие основные группы:
1) движущие автомобиль;
2) создающие сопротивление движению;
3) нормальные к направлению движения.
Первую группу силовых факторов представляет окружная сила на ведущих колесах, условно реализованная на рис. 16 в виде суммарной продольной реакции дороги SRx2 на колеса задней оси.
Вторую группу представляют: Fwx – cила сопротивления воздуха; F a - продольная составляющая силы тяжести автомобиля; Fjx – cила сопротивления поступательному разгону автомобиля; F c x – продольная сила на сцепном устройстве; S Rx1 – суммарная продольная реакция дороги на колеса передней ведомой оси; S Tf1 и S Тf2 – cуммарные моменты сопротивления качению колес соответственно передней и задней осей; S Тj1 и S Тj2 – суммарные инерционные моменты колес передней и задней осей.
Третью группу представляют такие вертикальные силы: SRz1 и SRz2 – суммарные вертикальные реакции дороги на колеса соответственно передней и задней осей; G н = Ga сosa- нормальная составляющая силы тяжести автомобиля; Fwz – нормальная к плоскости дороги составляющая полной аэродинамической силы; F c z – вертикальная нагрузка на сцепном устройстве.
Нормальные реакции опорной поверхности. Для нахождения нормаль- ных реакций дороги на колеса передней (SR z1) и задней (SR z2)осей используются уравнения моментов относительно опорных точек О 1 и О 2 (см. рис. 16). Считаем, что автомобиль не теряет контакта с дорогой, поэтому суммы моментов относительно указанных опорных точек равны нулю:
S T о 2 = 0;
SRz1l – G н b + Fwz bw + STf1 + STf2 + STj1 + STj2 + (F a + Fjx) hg + Fwxhw + F c x h c + F c z b c= 0;
S Т о 1 = 0;
- SRz2 l + G н а – Fwzaw + SТf1 + STf2 + STj1 + STj2 +(F a+ Fjx) hg + Fwxhw + F c x h c+ F c z (l + b c) = 0.
Отсюда после небольших упрощений (подставим SТf1 + STf2 = SТf и SТj1 + STj2 = = STj) получим величины нормальных осевых реакций
SRz1 = [ G н b – Fwz bw - STf - STj – (F a + Fjx) hg – Fwx hw - F c x h c – F c z b c ] / l
(54)
SRz2 = [ G н а – Fwz aw + STf + STj +(F a+ Fj) hg + Fwx hw + F c x h c + F c z (l + b c)] / l
(55) Частные случаи:
1. Одиночный автомобиль движется в гору с постоянной скоростью. (Cилой Fwz ввиду ее малости при скоростях движения, меньших 100 км/ч, пренебрегаем).
SRz1 = (G н b - SТf - F a hg – Fwx hw) / l =
= (Ga сosa b – Ga сosa f r д – Ga sina hg – W в Va 2 hw) / l @
@ [ Ga (b – f r д - a hg) – W в Va 2 hw ] / l.
По аналогии (если a < 7-8о)
SRz2 @ [ Ga (a + f r д + a hg) + W в Va 2 hw ] / l.
2. Одиночный автомобиль на горизонтальной площадке (т.е. статические нормальные реакции на колеса)
SRz1 cт = Ga b / l = G1;
SRz2 ст = Ga a / l = G2 .
Вводится понятие коэффициент изменения нормальных реакций mR1 и mR2
mR1 = SRz1 / SRz1 ст ; mR2 = SRz2 / SRz2 ст.
На подъеме и при разгоне mR1 < 1; mR2 > 1.
Тяговый баланс автомобиля. Это уравнение, показывающее распределение тяговой силы по видам сопротивления движению и являющееся для представленного на рис. 16 общего случая движения автомобиля уравнением равновесия параллельных опорной поверхности сил. Для суммы всех сил, направленных по оси Х, должно выполняться условие SFx = 0, т.е.
S Rx2 - S Rx1 - F a - Fwx - Fjx - F c x = 0. (56)
Используя ранее выведенное соотношение (9¢¢), можно написать, что
S Rx2 = T т / r д – f2 S Rz2 – (SJ к 2 Е к 2 ) / r д.
Из выражения (33) следует, что
Т т = [ Te – (µ e Te + Je) Ee ] u тр hтр,
и соответственно получаем S Rx2 в развернутом виде
S Rx2 = Te u тр hтр / r д – (µ е Те + Je) Ee u тр hтр / r д – f2 S Rz2 - (S J к 2 Е к 2 ) / r д.
(57)
Для ведомого колеса (см. п. 1.2) можно написать
S Rx1 = f 1 S Rz1 + (S J к 1 Е к 1 ) / r д. (58)
Таким образом, после подстановки в уравнение (56) выражений (57) и (58) и раскрывая составляющую Fjx = ma ax, получим
Те u трhтр /r д -(µ е Те + Je) Ее u трhтр /r д– f2 S Rz2 -(SJ к 2 Е к 2 ) /r д - f1S Rz1 -(SJ к 1 Е к 1 ) /r д – - ma ax - F a - Fwx – F c x = 0.
(59)
Для последующих преобразований используем известные зависимости
Е к 1 @ Е к 2 = Е к = ах / r к; Ее = Е к u тр = ах u тр / r к;
f1 S Rz1 + f2 S Rz2 = f ср G н = f Ga сosa; (60)
(SJ к 1 Е к 1 ) / r д + (SJ к 2 Е к 2 ) / r д = (SJ к Е к) / r д.
Из уравнения (59) соберем вместе все члены, описывающие инерционные свойства элементов системы, причем одновременно заменим в них ряд параметров, воспользовавшись выражениями (60)
ma ax + (µ eTe + Je) Ee u тр hтр / r д + (SJ к Е к) / r д =
= ma ax + (µ e Te + Je) ax u тр 2 hтр / r д r к + SJ к ах / r д r к = (61)
= ma ax [ 1 + (µ e Te + Je) u тр 2 hтр / r д r к m a + SJ к /r д r к m a ] =
= ma ax d j.
В окончательной формуле описания инерционных свойств автомобиля присутствует коэффициент d j, который называется коэффициентом учета вращающихся масс
d j = 1 + (µ e Te + Je) u тр 2 hтр / r д r к ma + SJ к / r д r к ma. (62)
Помня, что u тр = u кп u o,введем обозначения
s 1 = (µ е Те + Je) u o 2 hтр / r д r к ma;
s 2 = S J к / r д r к ma.
Получим новую интерпретацию для d j
d j = 1 + s 1 u кп 2 + s 2. (63)
Поскольку, как показали расчеты и исследования, для большинства автомобилей s 1 = 0,03 ¸ 0,05 и s 2 = 0,04 ¸ 0,06 при проектировочных расчетах тягово-скоростных свойств вновь создаваемых автомобилей использование выражения (63) значительно упрощает эту процедуру.
Окончательно уравнение (59) после подстановки в него выражений (40), (45), (49), (50),(60) и (61) приобретает вид
Те u тр hтр / r д – ma ax d j - f Ga сosa - Ga sina - 0,5 сх rв АхVwx2 – F c x = 0 (64)
или
d j ma ax = Te u тр hтр / r д - y Ga – W в Vwx2 - F c x . (65)
Необходимые условия обеспечения движения автомобиля. Из уравнений (64) и (65) следует, что предельным состоянием cистемы, при котором ее движение с постоянной скоростью еще продолжается, является ах = dVa / dt = 0.
1. Условие движения по преодолению сил сопротивления
Те u тр hтр / r д³ y Ga + W в Vwx2 + F c x .
2. Условие движения по сцеплению ведущих колес с дорогой
y Ga + W в Vwx2 + F c x £ Tе u тр hтр / r д £ S Rz2 j х
1.9. Построение тяговой характеристики автомобиля
Тяговой характеристикой автомобиля называется графическое изобра- жение уравнения тягового баланса в координатах тяговая сила F т (F к) – скорость автомобиля Vа. Левая часть уравнения тягового баланса включает в себя движущую автомобиль тяговую силу на колесах F т, а правая часть- все силы сопротивления его движению(Ff, F a, Fwx, Fjx, F c x )
F т = Ff + F a + Fwx + Fjx + F c x . (66)
В развернутом виде это уравнение, согласно выражению (65), может быть представлено как
Те u тр hтр /r д = f Ga сosa + Ga sina + W в Vwx2 + d j m a ax + F c x .
Его левую часть можно представить еще более подробно, если выразить передаточное число трансмиссии через ее составляющие (u тр = u кп u дк u o, где u дк - передаточное число дополнительной коробки)
F т = Те u кп u дк u o hтр / r д. (67)
Из соотношения (67) видно, что для получения всего многообразия значений тяговой силы на колесах F т при построении тяговой характеристики автомобиля необходимо располагать предварительно полученной по замерам на испытательном стенде или построенной теоретическим путем (см. п. 1.4) внешней скоростной характеристикой его двигателя, знать коэффициент коррекции стендовых характеристик k c и коэффициент учета подкапотных потерь k п. Поскольку тяговая характеристика строится для всех ступеней коробки передач и на высшей передаче дополнительной коробки (если она имеется в трансмиссии), а также при наибольшем общем передаточном числе трансмиссии, необходимо знать передаточные числа коробки передач u кп, дополнительной коробки u дк и главной передачи u о. Кроме того, необходимо иметь данные по КПД трансмиссии hтр или уметь его определить расчетным путем, а также определить динамический радиус колес r дведущей оси автомобиля.
Для привязки полученных при расчетах значений F т к скорости движения автомобиля используется формула
V a = w e r к / u кп u дк u o. (68)
Обычно тяговую характеристику автомобиля строят для условий движения с постоянной скоростью по дорогам без подъемов и спусков. Условно также считается, что воздушная среда неподвижна, т.е. ветер отсутствует. Если использование автомобиля не предполагает его постоянную работу с прицепом, сила на крюке Fcx также приравнивается нулю.
Таким образом, в правой части уравнения тягового баланса (66) остаются только два члена, а именно:
Ff + Fwx = f Ga + W в Va2 = f Ga + 0,5 сх rв Ах Va2 (69)
Следовательно, чтобы определить расчетным путем значения cилы сопротивления качению автомобиля Ff и силы сопротивления воздуха Fwx в зависимости от скорости его движения Va, необходимо знать полную массу m a или cилу тяжести Ga автомобиля, коэффициент сопротивления качению его шин f при движении по асфальтовому или бетонному шоссе, фактор обтекаемости W в или коэффициент обтекаемости сх и габаритные размеры для вычисления площади миделева сечения Ах.
Пример. Построить тяговую характеристику автомобиля КамАЗ-5510, оснащенного шинами 240/70R22,5.
Исходные данные.
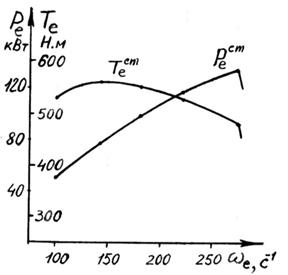
1. Внешняя скоростная характеристика двигателя показана на рис. 17.
Коэффициенты k с = 0,96 и k п = 0,96.
2. Полная масса автомобиля 14470 кг.
3. Передаточные числа трансмиссии:
коробка передач u 1 = 7,82; u 2 = 4,03; u 3 = 2,50; u 4 = 1,53; u 5 = 1,00;
главная передача u o = 5,40.
(Дополнительная коробка у данной модели автомобиля отсутствует).
4.Шины размерности 240/70R22,5. Коэффициент сопротивления качению
f o = 0,015 (при скорости до 60 км/ч), f = f o (1 + 0,0005 Va 2).
5.Коэффициент обтекаемости 0,95. Габариты поперечного сечения автомобиля
В г = 2,01 м; Н г = 2,63 м.
1-й этап решения: определение постоянных величин
1. r д= r ст = 0,5 d + l z Dш В ш = 0,43 м [cм. п. 1.1, формула (2)].
2. hтр = 0,96 · (0,99) 4 · 0,92 = 0,85 (см. п. 1.5).
3. Ах = 0,85 · 2,01 · 2,63 = 4,49 м2 [см. п. 1.7, формула (51)].
2-й этап: построение внешней скоростной характеристики двигателя,
установленного на автомобиле
Для построения этой характеристики с внешней скоростной характеристики двигателя, полученной в стендовых условиях (рис. 17) берутся несколько значений стендовой мощности Ре ст и стендового крутящего момента Те ст при пяти-шести значениях угловой скорости вращения коленчатого вала w е, охва-тывающих равномерными интервалами весь рабочий диапазон двигателя (от wmin до wmax). По формулам (19) и (20) определяется мощность Ре и крутящий момент Те двигателя при установке его на автомобиль. Выбранные значения w е, соответствующие им значения Ре ст и Те ст и вычисленные величины Ре и Те сводят в таблицу (см. табл. 4), по ним строят искомую характеристику двигателя.
3-й этап: построение тяговой характеристики КамАЗ –5510
 Необходимая для построения тяговой характеристики тяговая сила F т на ведущих колесах рассчитывается по формуле (67) при всех значениях передаточных чисел коробки передач u кп (см. исходные данные). Значения подкапотного момента двигателя Те, соответст-вующие выбранным для расчетаугловым скоростям w е , берутся из табл. 4. Для каждой передачи по формуле (68) определяется соответствующая скорость движения автомобиля.
Необходимая для построения тяговой характеристики тяговая сила F т на ведущих колесах рассчитывается по формуле (67) при всех значениях передаточных чисел коробки передач u кп (см. исходные данные). Значения подкапотного момента двигателя Те, соответст-вующие выбранным для расчетаугловым скоростям w е , берутся из табл. 4. Для каждой передачи по формуле (68) определяется соответствующая скорость движения автомобиля.
|
Таблица 4
Результаты расчетов внешней скоростной характеристики двигателя, установленного
на автомобиль КамАЗ-5510, и тяговой характеристики этого автомобиля
| w е, с-1 | 100 | 140 | 180 | 220 | 273 |
| Ре ст, кВт | 55,0 | 77,5 | 99,0 | 117,0 | 133,0 |
| Ре, кВт | 50,7 | 71,4 | 91,2 | 107,8 | 122,5 |
| Те ст, Н.м | 528 | 564 | 555 | 531 | 485 |
| Те, Н.м | 487 | 520 | 511 | 489 | 447 |
| Va1, м/с | 1,02 | 1,43 | 1,84 | 2,24 | 2,78 |
| F т 1 , кН | 40,65 | 43,40 | 42,65 | 40,82 | 37,31 |
| Va2, м/с | 1,98 | 2,77 | 3,56 | 4,35 | 5,40 |
| F т 2 , кН | 22,37 | 23,89 | 23,48 | 22,46 | 20,54 |
| Va3, м/с | 3,18 | 4,46 | 5,73 | 7,00 | 8,69 |
| F т 3 , кН | 12,98 | 13,86 | 13,62 | 13,03 | 11,91 |
| Va4, м/с | 5,02 | 7,29 | 9,38 | 11,45 | 14,21 |
| F т 4 , кН | 7,97 | 8,51 | 8,37 | 8,00 | 7,32 |
| Va5, м/c | 7,96 | 11,15 | 14,33 | 17,52 | 21,74 |
| F т 5 , кН | 5,20 | 5,55 | 5,45 | 5,22 | 4,77 |
| f | 0,015 | 0,015 | 0,0165 | 0,017 | 0,0185 |
| Ff , кН | 2,13 | 2,13 | 2,34 | 2,41 | 2,63 |
| Fwx, кН | 0,16 | 0,32 | 0,54 | 0,80 | 1,23 |
| Ff + Fwx, кН | 2,29 | 2,45 | 2,88 | 3,21 | 3,86 |

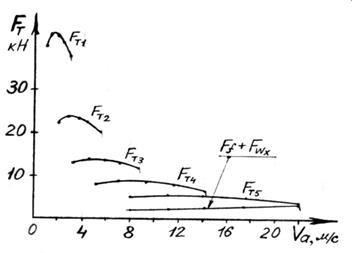 Силы сопротивления движению Ff и Fwx рассчитываются с использованием составляющих формулы (69) при тех же скоростях движения Va, при которых
Силы сопротивления движению Ff и Fwx рассчитываются с использованием составляющих формулы (69) при тех же скоростях движения Va, при которых
|
 были произведены расчеты F т на высшей передаче в коробке пе- редач. Результаты расчетов сводятся в таблицу (см. табл.4) и с их использованием строятся графические зависимости F т от Va на соответствующих передачах в коробке передач, а также зависи-
были произведены расчеты F т на высшей передаче в коробке пе- редач. Результаты расчетов сводятся в таблицу (см. табл.4) и с их использованием строятся графические зависимости F т от Va на соответствующих передачах в коробке передач, а также зависи-
мость суммарной силы сопротив-
ления Ff + Fwx от скорости движения автомобиля на высшей передаче (рис. 18).








