2020-04-12
2020-04-12 470
470Cущность определения места судна в процессе наблюдения оператор измеряет значения не менее двух навигационных параметров в первую очередь измеряются велечины 2-х параметров, конкретные значения, которых на поверхности земли соответствуют изолинии, которая проектируется на карту, в уменьшенном масштабе, а точки их пересечения в системе координат широты и долготы дает место судна с Обс. Широтой и Обс. Долготой.
средняя квадратическая погрешность (СКП) – это среднее квадратическое отклонение измеренного навигационного параметра (Ui) от вероятнейшего его значения (UB).
Основные этапы развития судовождения
Главная задача судоводителя – провести судно из одного пункта в другой наивыгоднейшим путем, то есть в кратчайший срок, безопасно для людей, груза и самого судна.
Таким образом, основной задачей судовождения является обеспечение навигационной безопасности в любых условиях плавания.
Исходя из этой основной задачи, методика современного судовождения предусматривает решение следующих частных задач:
- предварительный выбор наиболее выгодного пути судна;
- вождение судна по заранее намеченному пути и осуществление контроля за плаванием по этому пути;
- изучение внешних факторов, влияющих на движение судна, сущность этого влияния и методы его учета.
Решение этих задач, обеспечивающее навигационную безопасность плавания и управление судном для достижения намеченных целей называют судовождением.
Процесс исторического развития методов и средств судовождения можно разделить на четыре основных этапа:
| I. | Судовождение, основанное только на лоцманском методе. |
| II. | Судовождение с использованием лоцманского метода и графического счисления пути судна. |
| III. | Судовождение, основанное на штурманском методе. |
| IV. | Современное судовождение, основанное на штурманском методе с использованием средств автоматизации счисления пути судна и определения его места в море различными способами и методами. |
На первом этапе развития методы судовождения были весьма примитивными. Отсутствие компаса вынуждало мореплавателей совершать только прибрежное плавание. В этот период применяется только лоцманский метод, основанный на использовании для ориентировки в море приметных береговых объектов и небесных светил. Только в конце XII века европейцам стало известно от арабов о простейшем указателе направления в море – магнитной игле.
Начало второго этапа развития методов судовождения относится к эпохе Возрождения и Великих Географических Открытий, когда начинается ускоренное развитие методов и средств судовождения.
Потребности быстрого экономического развития отдельных стран вызвали бурное развитие торговли и, как следствие, мореплавания. На судах появляются магнитные компасы, карты и песочные часы. Наличие этих, хотя и примитивных, средств обусловило возможность ведения счисления пути судна и обеспечило плавание судов вдали от берегов.
12.Х.1492 г. генуэзец Христофор Колумб (1451÷1506 гг.) открыл американский материк.
В 1499 г. португалец Васко да Гама (1469÷1524 гг.) обогнул Африку и достиг берегов Индии.
В 1504 г. флорентиец Америго Веспуччи (1454÷1512 гг.) вторично достиг берегов Америки.
В 1519÷1521 гг. португалец Фернан Магеллан (~ 1480÷1521 гг.) совершил первое кругосветное плавание.
В 1569 г. фламандец Герард Крамер – лат. Меркатор (1512÷1594 гг.) предложил свою знаменитую картографическую проекцию.
Дальнейшему усовершенствованию счисления пути судна, как основы штурманского метода судовождения, способствовало появление часов с балансиром, меркаторских карт и ручного лага. Однако счисление пути судна в море в XVI веке было весьма приближенным из-за недостаточной точности морских карт и несовершенства приборов счисления.
Третий этап развития судовождения связан с появлением навигационных способов определения места судна. К концу XVII века, благодаря применению триангуляции, значительно повысилась точность геодезических работ и морские навигационные карты территорий, охваченных триангуляцией, стали достаточно точными и позволили определять место судна в море по наблюдениям береговых ориентиров.
В XVIII веке мореходные инструменты пополнились навигационным секстаном (~ 1732 г.) и хронометром (~ 1761 г.), что дало возможность производить определения места судна по наблюдениям небесных светил.
Появление паровых судов, увеличение их скорости хода потребовало повышения точности плавания, а это вызвало, в свою очередь, дальнейшее совершенствование средств и методов счисления пути, а также способов навигационных и астрономических определений места судна в море.
Штурманский метод судовождения, основанный на применении счисления пути судна и контроле счисления навигационными и астрономическими обсервациями, становится основным методом судовождения.
Третий этап развития судовождения характеризуется быстрым развитием теории судовождения, образованием отдельных дисциплин этой прикладной науки, охватывающей широкий круг вопросов, связанных с различными отраслями. Большой вклад в развитие судовождения внесли многие ученые и мореплаватели и среди них Г.И.Бутаков (1820÷1892 гг.), С.О. Макаров (1848÷1904 гг.) и многие, многие другие. На основании их трудов создаются теоретические основы судовождения как научной дисциплины.
Четвертый этап развития судовождения начинается с появлением электронавигационных приборов и открытием в 1895 г. радио великим ученым А.С.Поповым (1859÷1906 гг.). Увеличение скорости хода морских судов потребовало значительного повышения точности их плавания. Решению этой задачи способствовало создание гироскопических курсоуказателей (~ 1913 г.) и электромеханических лагов, использование которых не только повысило точность счисления пути судна, но и дало возможность автоматизировать процесс ведения счисления.
Необходимость высокой точности счисления пути судна потребовала обстоятельно разработать вопросы, связанные с влиянием внешних факторов (ветра и течения) на перемещение судна. Наибольшее развитие эта проблема получила в трудах известных ученых и моряков: Н.Н. Матусевича (1879÷1950 гг.), А.Н. Крылова (1863÷1945 гг.) и многих других.
Дальнейшее развитие радио намного расширило возможности определения места судна в море. В 1912 г. начинается использование радиоакустического способа определения места, а в 1915 г. производятся уже первые определения места судна с помощью судового радиопеленгатора.
На основе разработанного академиками Н.Д. Папалекси (1880÷1947 гг.) и Л.И.Мандельштамом (1879÷1944 гг.) метода измерений расстояний по радио в 1937 г. испытывается первая в мире фазовая радионавигационная система.
В 1939 г. для определения места судна в любых условиях видимости начали применять радиолокацию.
Использование радиопеленгования, радионавигационных систем и радиолокации в судовождении привело к значительному повышению точности определения места и в корне изменило представления мореплавателей о плавании в малую видимость, так как стало возможным непрерывно наблюдать за перемещением судна относительно навигационных опасностей.
Развитие средств и методов контроля счисления пути судна сопровождалось разработкой теоретических положений об определениях места судна в море.
Создание мощной индустрии в развитых странах позволило создать большой морской и океанский флот. На судах этого флота установлены лучшие образцы курсоуказателей, лагов, эхолотов, радиопеленгаторов, радиолокаторов, приемоиндикаторов береговых и спутниковых радионавигационных систем.
С 1967г. в коммерческом судоходстве начинают использоваться низкоорбитальные спутниковые радионавигационные системы «Транзит» (США) и «Цикада» (РФ), а с 1991 г. и среднеорбитальные спутниковые радионавигационные системы «Навстар» (США) и «Глонасс» (РФ), что позволило мореплавателям определять место своего судна в любой точке Мирового океана, в любое время, при любых условиях плавания и с высокой точностью.
Высокая точность современного судовождения обеспечивается не только с помощью новейшей навигационной техники, но и отличным знанием судоводителями любого ранга штурманской специальности, что достигается кропотливым и систематическим изучением всех тех вопросов, которые непосредственно связаны с мореплаванием.
2. Фигура и размеры Земли: геоид, апиоид земной сфероид и референц-эллипсоиды.
Когда говорят о фигуре Земли, то понимают воображаемое земное тело, которое можно представить поверхностью уровня мирового океана. Эта поверхность в любой точке Земли перпендикулярна вектору силы тяжести. Так как плотность масс Земли в ее толще распределяется чрезвычайно неравномерно, то и воображаемая поверхность Земли образует сложное трехмерное тело. Тщательные измерения показали, что такая фигура имеет неправильную форму и не может быть описана общим математическим уравнением. Эта фигура называется геоидом, что в переводе с греческого означает землеподобный.
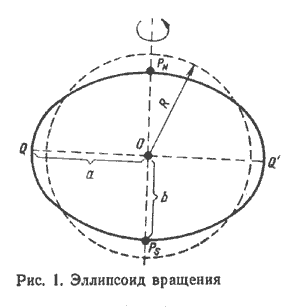
Геометрия геоида очень сложна, поэтому для решения задач навигации на море, используют приближение геоида к правильной математической форме, называемой эллипсоидом вращения. Вращая эллипсоид вокруг малой оси, получают поверхность близкую к поверхности фигуры Земли. Его еще называют земным сфероидом (фигура равновесия вращающейся жидкой массы). Поэтому понятие «Земной сфероид» аналогичен понятию «Земной эллипсоид». Эллипсоид вращения соответствует следующим условиям приближения:
- объем эллипсоида равен объему геоида,
- большая полуось эллипсоида совпадает с плоскостью экватора геоида,
- малая полуось направлена по оси вращения Земли.
-  Для геодезических и картографических расчетов эллипсоид должен иметь определенную ориентацию и размеры. Это референц-эллипсоид. В конкретных государствах к нему относят все измерения на Земной поверхности. Отсюда вытекает, что координаты одинаковых точек могут не совпадать на картах, изданных в различных странах, так как там все измерения проводят относительно другого референц-эллипсоида.
Для геодезических и картографических расчетов эллипсоид должен иметь определенную ориентацию и размеры. Это референц-эллипсоид. В конкретных государствах к нему относят все измерения на Земной поверхности. Отсюда вытекает, что координаты одинаковых точек могут не совпадать на картах, изданных в различных странах, так как там все измерения проводят относительно другого референц-эллипсоида.
- Для решения задач по определению места судна с помощью глобальных РНС применяют специальные референц-эллипсоиды (р/эллипсоид), имеющие международный статус. Для этой цели применяли р/эллипсоид WGS-72. В настоящее время применяют уточненный р/эллипсоид WGS-84 (World Geodetic System – 1984 year.).
- В России и в Украине используют референц-эллипсоид Красовского, параметры которого:
- большая полуось а = 6378 245 метров,
- малая полуось b = 6356 863 метра
- Эксцентриситет е = 
- Сжатие a = 
- В навигационных задачах, не требующих высокой точности, Землю принимают за шар, объем которого равен объему эллипсоида, исходя из соотношения:
-  (1.1)
(1.1)
- Радиус модели Земли, как шара равен R = 637 110 метров. Радиус шара, одна минута дуги большого круга которого равна одной морской миле, будет RМ =6366 707м
- Если в качестве приближенной к поверхности геоида применяется сфера, то в этом случае нормаль к поверхности совпадает с направлением на центр сферы.
- Другие референц-эллипсоиды (табл. № 1.1):
- Табл. № 1.1
| Название референц-эллипсоида | Большая полуось а | Сжатие a | Примечание |
| W G S - 84 | 6378137 | 0,0066943800 | Международный |
| П З - 90 | 6378136 | 0,0066946619 | Россия |
| Эйри (1930г.) | 6375970 | 1/293,30 | Англия |
| Южная Америка (1964г.) | 6378160 | 1/298,25 | Ю. Америка |
| Хейфорда (1909г.) | 6378383 | 1/297,0 | Европа |
| Кларка (1866г.) | 6378206 | 1/294,98 | С. Америка |
| Бесселя (1841г.) | 6377398 | 1/299,15 | Япония |
-
- По последним данным спутниковой геодезии, Земля имеет форму апиоида, т. е. тела грушевидной формы (Земля удлинена к северному полюсу и сплющена у южного полюса). Как не парадоксально, такую форму Земли предполагал Христофор Колумб. Ведутся работы по применению в навигации и более точной модели геоида, которая является трехосным эллипсоидом.