 2020-04-12
2020-04-12 1102
1102
Технические средства автоматизации роботов манипуляторов представлены широким спектром различных датчиков для контроля состояния как самого робота-манипулятора так и его рабочей зоны. Датчики промышленных роботов-манипуляторов подразделяются на два типа- датчики внутреннего состояния и датчики внешнего состояния.
Датчики внутреннего состояния служат для формирования сигналов в цепях обратных связей по положению и скорости звеньев робота-манипулятора.
Датчики внешнего состояния предназначены для измерения параметров в дальней и ближней зонах, а также для тактильных измерений. Датчики внешнего состояния подразделяются на следующие виды:
1 Контактные датчики -производят измерения при контакте с объектом в процессе касания, проскальзывания или кручения.
2 Бесконтактные датчики - основаны на определении изменений акустического излучения или электромагнитного поля при взаимодействии с объектом.
6.1 Датчики измерения в дальней зоне
Датчики измерения в дальней зоне предназначены для определения расстояния от точки отсчета, обычно связанной с самим датчиком, до объекта в рабочем диапазоне измерений. Такие датчики используются для навигации робота и обхода препятствий, когда требуется оценить расстояния до ближайших объектов или определить местоположение и форму объектов в рабочем пространстве робота.
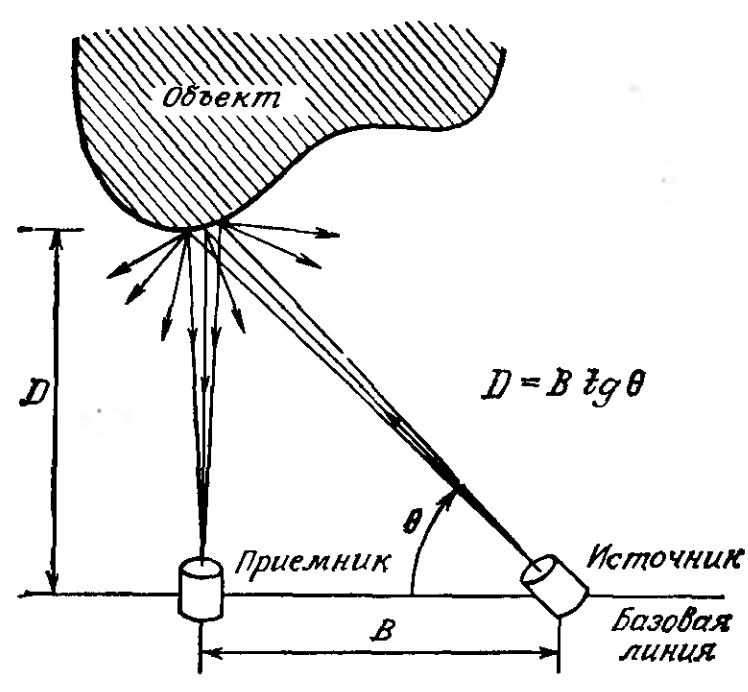
Рисунок 6.1-Измерение расстояния методом триангуляции
 |
| а) |
 |
| б) |
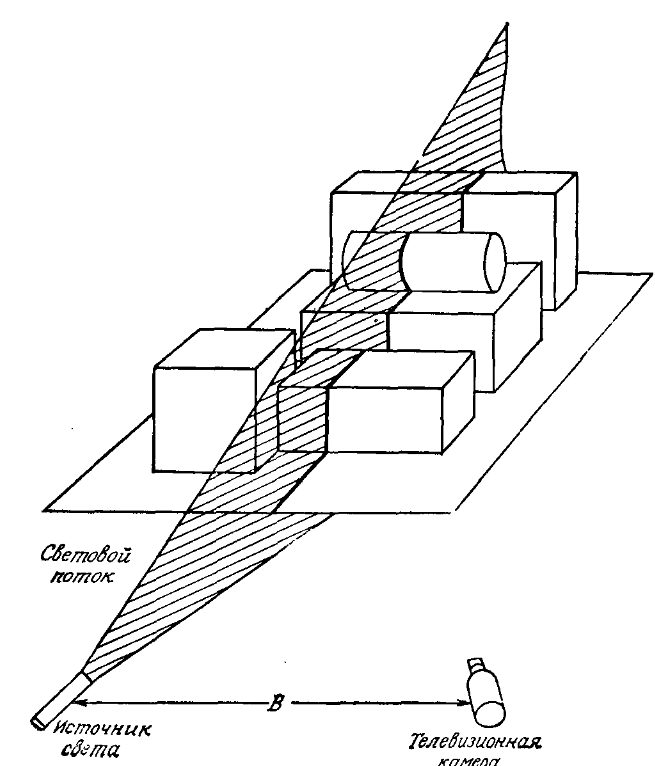
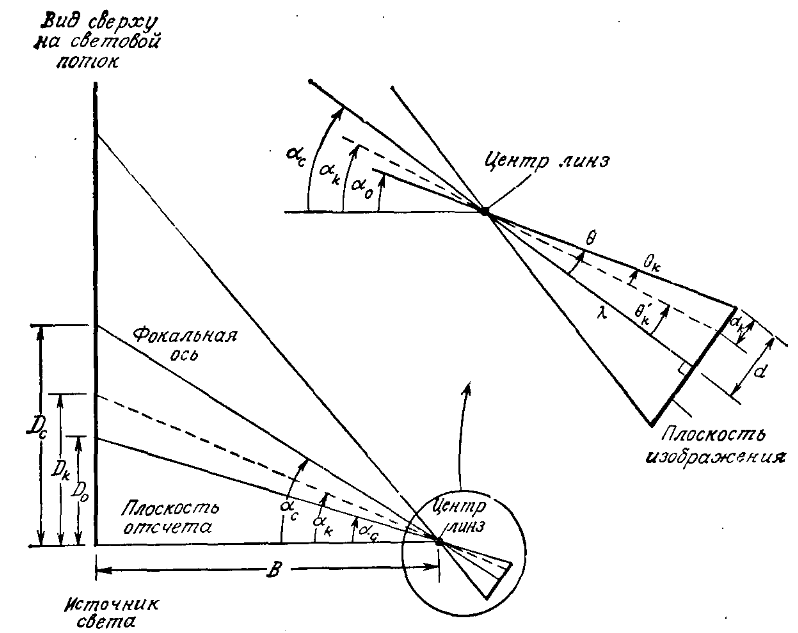
| Рисунок 6.2- Измерение расстояния методом подсветки |
6.1.1 Датчик, основанный на методе триангуляции
Схема такого датчика приведена на рисунке 6.1. Объект освещают узким лучом света направленным на его поверхность. Движение луча в плоскости определяется линией от объекта до приемника света и линией от приемника до источника света. Если приемник расположен на малом участке поверхности при обнаружении приемником светового пятна расстояние D до освещенного участка поверхности может быть вычислено геометрически
D= Вtg q
Угол образованный источником и базовой линией q и расстояние В между источником и приемником предполагаются известными.
6.1.2 Датчик, основанный на методе подсветки
Конструкция датчика, основанного на методе подсветки, приведена на рисунке 6.2. Работа такого датчика основана на проецировании светового потока на группу объектов (рисунок 6.2 а) и использовании изменения формы потока для вычисления расстояния (рисунок 6.2 б).
В качестве светового потока обычно используется световая полоса генерируемая через цилиндрические линзы. Пересечение светового потока с объектами образует на них полосы света фиксируемые камерой. Камера размещается на расстоянии В от источника света. Отклонение лучей света указывает на изменение поверхности, а разрыв на промежутки между поверхностями.
6.1.3 Датчики измерения расстояния по времени прохождения сигналов
Рассмотрим конструкцию датчика, основанную на использовании лазера (рисунок 6.3).
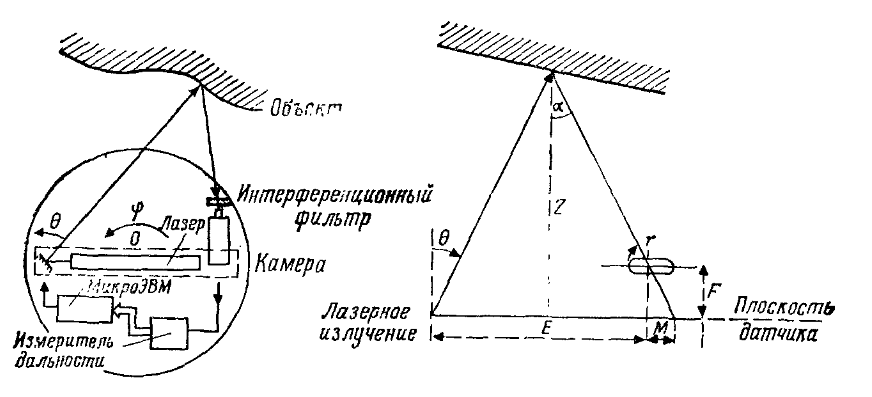
Рисунок 6.3- Измерение расстояния с использованием лазера
В данном датчике в качестве источника света используется лазер, который формирует световой импульс. Световой импульс отражается от поверхности объекта и возвращается вдоль оси от отражающей поверхности и попадает в фотоэлемент. Установив время прохождения импульса от момента подачи до приема его фотоэлементом можно вычислить расстояние до объекта следующей по формуле
D = cT /2, (6.1)
где Т - время прохождения светового импульса, с – скорость света 0,3 м/нс.
Точность измерения расстояния таким датчиком ±6,3мм.
Конструкция датчика измеряющего расстояние по фазовому сдвигу приведена на рисунке 6.3.
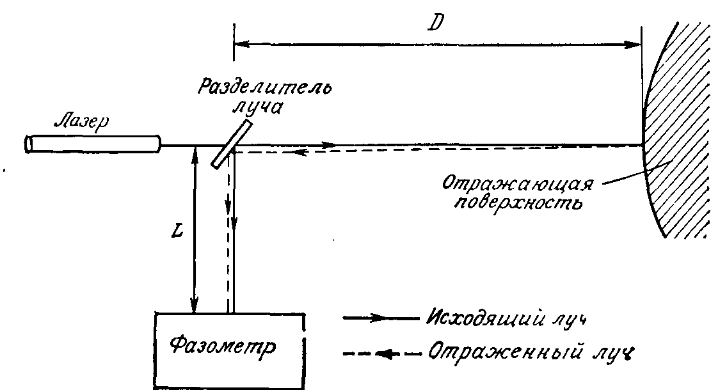
Рисунок 6.4- Измерение расстояния по фазовому сдвигу
Такой датчик, основан на использовании непрерывного луча лазера. Принцип действия датчика основан на измерении фазового сдвига между посылаемым и возвращаемым лучами. Луч лазера с длинной волны λ расщепляется на 2 луча. 1 их них проходит расстояние L к фазометру, а другой проходит расстояние D до отражающей поверхности. Причем общее расстояние, пройденное отраженным лучом составит
 ,
,  , (6.2)
, (6.2)
где q – измеренная фазометром величина фазового сдвига между исходящим и отраженным лучами.
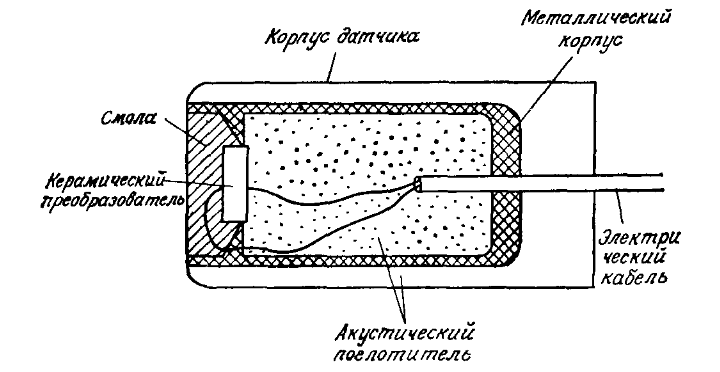
Схема ультразвукового датчик-измерителя расстояния такого аналогична схеме приведенной на рисунке 6.3, однако вместо лазера используется источник ультразвука. Принцип действия датчика основан на том, что ультразвуковой сигнал передается за короткий промежуток времени и т.к. скорость звука известна для определенной среды, то вычисление интервала времени между посылаемым и отражаемым сигналами позволяет дать оценку расстояния до отражающей поверхности.
6.2 Датчики измерения в ближней зоне
Датчики измерения в ближней зоне предназначены для определения наличия объекта в пределах установленного пространства. Датчики применяются для получения информации об объектах в ближней зоне манипулятора, а так же при захвате объекта или обходе его роботом.
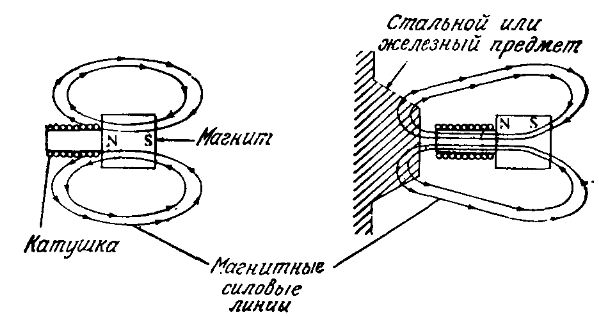
6.2.1 Индуктивный датчик
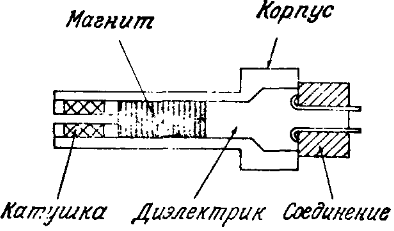
Индуктивный датчик позволяет фиксировать наличие в фиксируемой зоне стальных или железных объектов. Конструкция индуктивного датчика приведена на рисунке 6.5
 |
| а) |
 |
| б) |
| Рисунок 6.5-Конструкция индуктивного датчика |
Принцип действия индуктивного датчика основан на изменении индуктивности при взаимодействии датчика с металлическим объектом. Когда такой датчик приближается к феромагнитному материалу (сталь, железо), происходит изменение силовых линий постоянного магнита. При отсутствии движения силовые линии не изменяются и в катушке не индуцируется ток. Если же в поле постоянного магнита появляется перемещающийся феромагнитный материал, возникающее в результате этого изменение силовых линий индуцирует импульс тока, амплитуда и форма которого пропорциональны уровню изменения магнитного поля
6.2.2 Датчик Холла
Принцип действия такого датчика основан на эффекте Холла, который связывает напряжение между двумя точками в проводнике, с магнитным полем, воздействующим на этот материал. На заряженные частицы в движущемся магнитном поле действует сила Лоренца. При внесении феромагнитного материала в зону действия полупроводникового магнитного прибора напряженность магнитного поля увеличивается, а сила Лоренца уменьшается. В итоге напряжение на полупроводнике снижается. Снижение напряжения и есть сигнал о том, что объект присутствует в зоне действия датчика. В качестве полупроводника обычно используют кремний
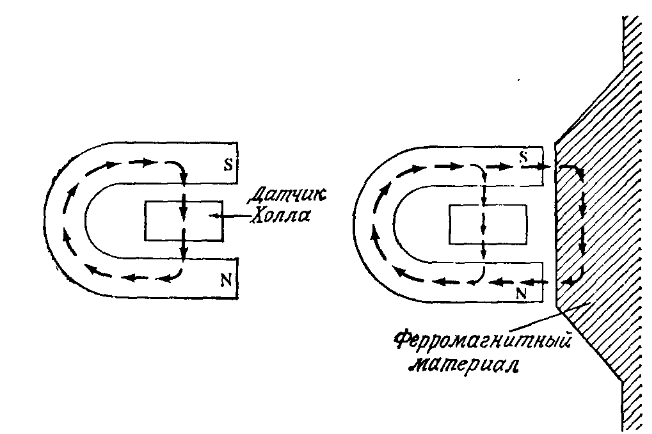
Рисунок 6.6-Конструкция датчика Холла
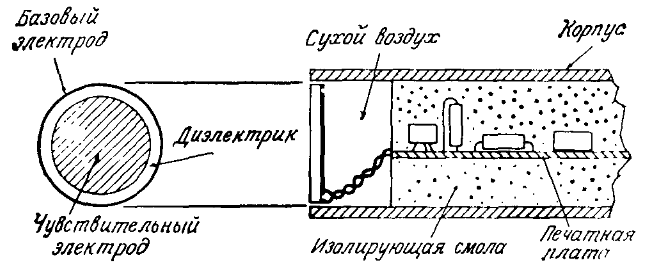
6.2.3 Емкостные датчики
Емкостной датчик обладает способностью обнаруживать объекты из неметаллических материалов. Конструкция емкостного датчика приведена на рисунке 6.7. Принцип действия датчика основан на изменении емкости, которая зависит от расстояния до поверхности объекта в зоне действия чувствительного элемента. Датчик представляет собой конденсатор, включенный в состав колебательного контура. Колебания в этом контуре возникают в том случае, если емкость датчика превышает пороговое значение. Появление колебаний – есть сигнал о том, что в зоне действия датчика присутствует объект.
 |
| а) |
 |
| б) |
| Рисунок 6.7-Конструкция емкостного датчика |
6.3 Тактильные датчики
Тактильные датчики предназначены для получения информации о контакте робота-манипулятора с некоторыми объектами, расположенными в его рабочей зоне. Тактильные датчики делятся на следующие виды:
1 Дискретные пороговые датчики -это датчики, которые срабатывают при наличии (отсутствии) объекта.
2 Аналоговые датчики - это датчики выходной сигнал с которых пропорционален усилию, прилагаемому к объекту.
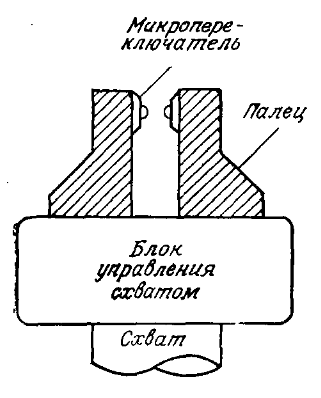
6.3.1 Дискретные пороговые датчики
Конструкция дискретного порогового датчика, размещаемого на схвате робота-манипулятора приведена на рисунке 6.8. Датчик состоит из микропереключателей, размещенных на пальцах захватного устройства. Микропереключатели включаются при контакте пальцев с объектом, тем самым сигнализируя о наличии контакта.
 |
| а) |
 |
| б) |
| Рисунок 6.8-Конструкция дискретного порогового датчика |
6.3.2 Механический аналоговый датчик
Механический аналоговый датчик преобразует величину силы, действующей на объект с его стороны в пропорциональный угол поворота оси. Конструкция механического аналогового датчика приведена на рисунке 6.9. Принцип действия датчика основан на том, что горизонтальная сила, действующая на подпружиненный стержень пропорциональна углу поворота оси связанной с этим стержнем.
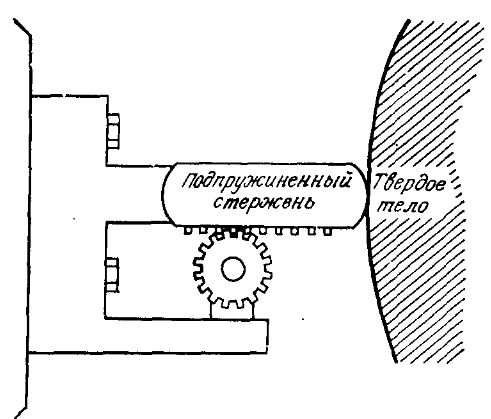
Рисунок 6.9-Конструкция механического аналогового датчика
6.4 Силоментные датчики
Силоментные датчики предназначены для определения сил реакции, возникающих при механической сборке. Силоментные датчики бывают двух модификаций
1 Датчики для сочленений манипулятора.
2 Датчики для технологического инструмента.
Датчики, установленные на сочленениях манипулятора, измеряют в декартовых координатах силы и крутящие моменты, которые воздействуют на манипулятор, и производят их векторное их сложение. Общий вид такого шестикомпонентного датчика силы приведен на рисунке 6.9 а.
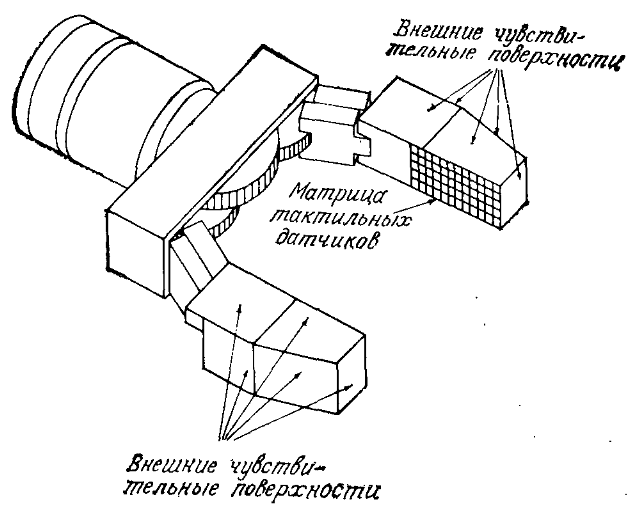
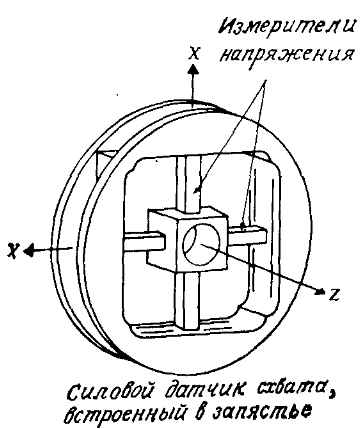
Датчик технологического инструмента размещается между конечным звеном манипулятора и технологическим инструментом, и состоит из измерителей механических напряжений, которые определяют отклонение механической системы манипулятора под действием внешних сил. Общий вид такого датчика силы приведен на рисунке 6.9 б.
 |
| а) |
 |
| б) |
| Рисунок 6.9-Силоментные датчики |
 |
| а) |
 |
| б) |
| Рисунок 6.10-Конструкция силоментного датчика |
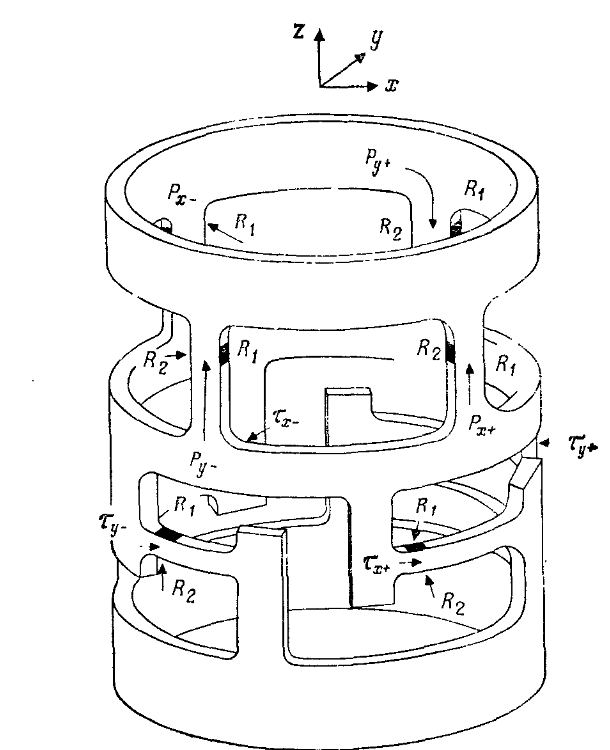
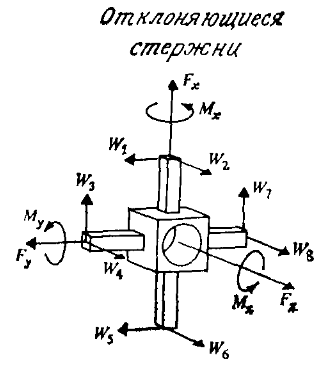
Конструкция силоментного датчика приведена на рисунке 6.10. Датчик состоит из восьми пар полупроводниковых измерителей механических напряжений, установленных на четырех отклоняющих стержнях, по одному измерителю на каждом стержне. Измерители механических напряжений, установленные с противоположных концов датчика, подключены к диференциально-потенциометрическому контуру. Выходное напряжение этого контура пропорционально компонентам сил перпендикулярных к плоскости измерителя.
К силоментным датчикам предъявляются следующие требования:
1 Высокая жесткость.
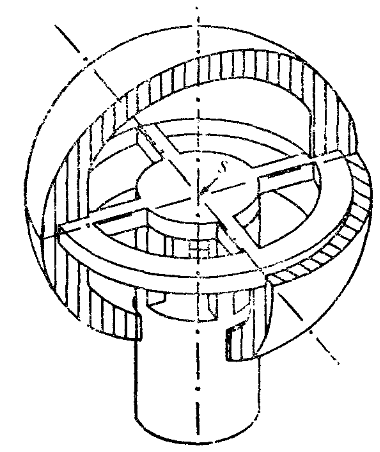
2 Компактность конструкции с целью облегчения движения манипулятора (например измерительный шар, рисунок 6.10 б).
3 Линейность выходного сигнала чувствительных элементов.
4 Малые величины гистерезиса и внутреннего трения.








