2020-04-12
2020-04-12 949
949Механизмы непрерывного транспорта проще по своему устройству и эксплуатации, чем такие транспортные средства, как краны и подъемники, имеющие циклический характер нагрузки. По количеству перемещаемых грузов и длине трасс механизмы непрерывного транспорта часто могут успешно соревноваться с автомобильном и железнодорожном транспортом и могут быть использованы для перевозки пассажиров. Наиболее распространенными механизмами непрерывного транспорта являются конвейеры различных типов, конструкция которых определяется главным образом характером перемещаемых грузов, весом и скоростью их движения: ленточные, пластинчатые, роликовые, цепные, подвесные. Наиболее распространенны ленточные конвейеры для транспортировки сыпучих грузов: зерна, кормов, песка, глины, руды, угля и тому подобное.
К электроприводу конвейеров предъявляются требования высокой надежности, простоты обслуживания, плавности и обеспечение повышенного момента при пуске, небольшого регулирования скорости и согласованному вращению нескольких электроприводов при значительной длине конвейера (до 1500 м). Всем этим требованиям в достаточной степени удовлетворяют асинхронные двигатели с короткозамкнутым ротором и с контактными кольцами. Двигатель должен располагаться, как правило, после участка с наибольшей нагрузкой (большое число грузов, крутые подъемы и перегибы, наивысшая точка подъема).
Применение многодвигательных приводов позволяет улучшить эксплуатационные показатели по сравнению с одиночным. При работе вхолостую может работать один двигатель, под нагрузкой - два, а в случае завалов конвейера транспортируемыми материалами возможен и пуск всех двигателей одновременно. Кроме того, улучшается равномерность натяжения ленты или цепи конвейера, уменьшается нагрузка тягового органа (механическое оборудование может быть выбрано более легким). Однако при этом возникает необходимость в согласованном движении нескольких двигателей конвейеров. Для этого применяются системы согласованного вращения по схеме машин двойного питания, то есть статорные обмотки двигателей подключены в сеть переменного тока постоянной частоты, а роторные обмотки двигателей питаются от преобразователя частоты.
Основным средством автоматизации, применяемым в поточно-транспортных системах, являются блокировки, осуществляющие между электроприводами взаимную связь, соответствующую технологическому процессу. Блокировки обеспечивают определенный порядок пуска и остановки отдельных двигателей. Кроме того, на всю установку имеется централизованное управление, общее для всех механизмов данной поточно-транспортной системе. Для пуска участка достаточно включить двигатель механизма, расположенного последним по потоку материала. Это приведет к автоматическому включению всех предшествующих механизмов этого участка. Блокировочные связи электроприводов обеспечивают необходимую последовательность пуска механизмов, соответствующую технологическому потоку материала. Делается это во избежание завала транспортируемым материалом отдельных механизмов. В этих же цепях блокировки приводят к отключению двигателей всех предшествующих по потоку механизмов при остановке любого механизма.
Схема (рис. 15.3) предусматривает два режима управлени): А – централизированное автоматическое включение, М - местное включение. Выбор режима управления производится с помощью универсальных переключателей SA1 и SA2.
Местное управление осуществляется оператором непосредственно у места установки пусковых аппаратов привода конвейера. Универсальные переключатели SA1 и SA2 устанавливаются в положение М. При этом замыкаются контакты К1, К2, К4, К5, K7 (шунтируется блок – контакты КМ1 в цепи катушки пускателя КМ2). Пуск и остановка транспортеров в этом режиме производится кнопками SB1 и SB4 «Пуск», SB3 и SB5 «Стоп».
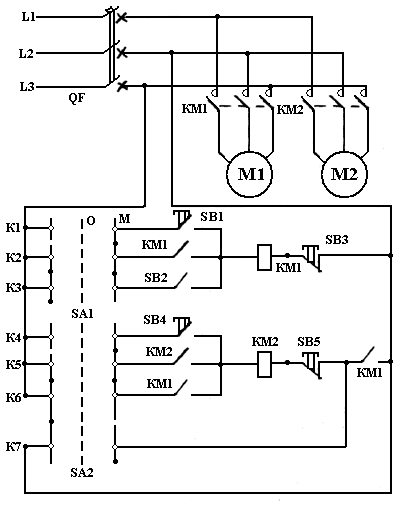
Рис. 15.3. Принципиальная схема управления электроприводом непрерывного транспорта
Автоматическое централизованное управление позволяет освободить человека от непосредственного участия в пуске каждого приводного двигателя технологической цепи механизмов. При этом способе управления оператор дает только начальный командный импульс на пуск и остановку механизмов. Универсальные переключатели SA1 и SA2 устанавливаются в положение А. При этом замыкаются контакты К2, К3, К5, К6. Двигатели пускаются поточно-транспортной системы кнопкой SB2 «Пуск». При этом сначала запускается двигатель М1, блок – контакты катушки пускателя КМ1 замыкаются в цепи управления катушки пускателя КМ2. На неё подается напряжение и запускается двигатель М2. Двигатель М2 останавливается при нажатии на кнопку SB5 «Стоп», а двигатели М1 и М2 одновременно останавливаются кнопкой SB3 «Стоп».
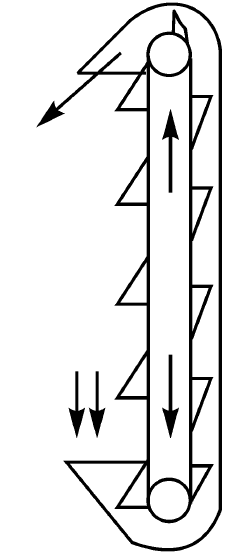
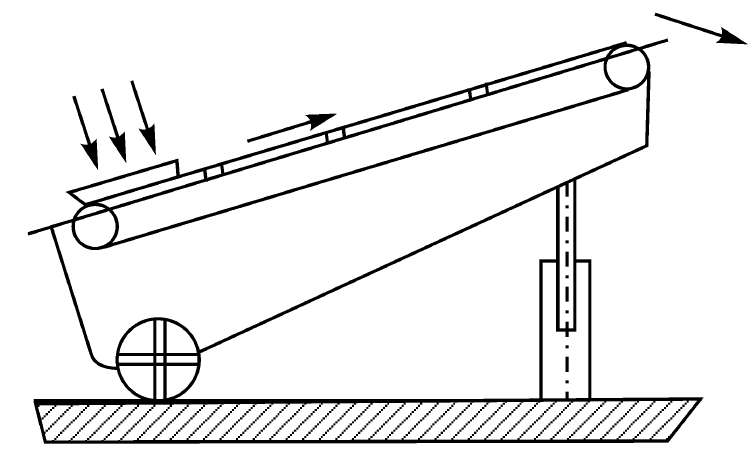
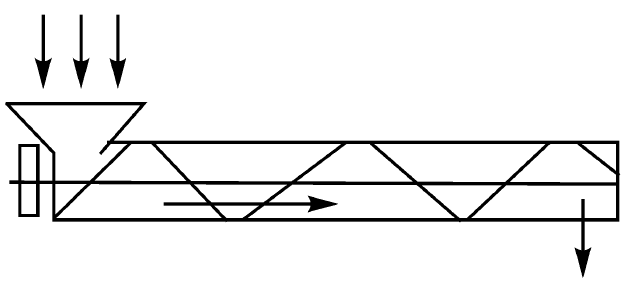
Транспортеры, или подъемно-транспортные машины непрерывного действия, используются для перемещения сельскохозяйственных грузов между кормоприготовительными агрегатами в кормоцехах и на комбикормовых заводах, для раздачи кормов, обслуживания машин на пунктах первичной обработки зерна, перемещения сыпучих строительных материалов и во многих других технологических процессах, организованных по схеме поточной линии. Непрерывность действия транспортеров обеспечивает их высокую производительность, определяет достаточные простоту и надежность электропривода. На рис. 19.1 показаны кинематические схемы наиболее распространенных типов транспортеров. Тяговыми органами транспортеров служат текстильные прорезиненные ленты специального изготовления, цепи различных конструкций, тросы.
 |  |
| а) | б) |
 |  |
| в) | г) |
Рис. 19.1. Кинематические схемы стационарных транспортеров:
а –ковшевого (нория), б − скребкового, в –ленточного, г −шнекового
Для механизмов с гибким тяговым органом характерно наличие следующих основных узлов:
1. Опорных органов в виде роликов, по которым перемещается лента; настила (желоба), по которому движутся скребки; монорельса для движения кареток и др..
2. Приводной станции, формирующей тяговое усилие и движение тягового органа.
3. Натяжной станции, обеспечивающей необходимое натяжение тягового органа.
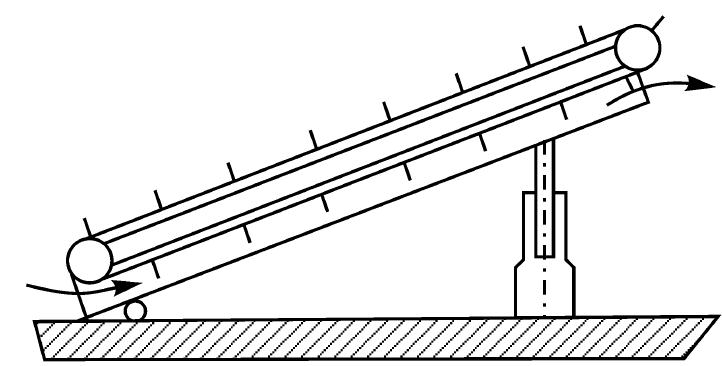
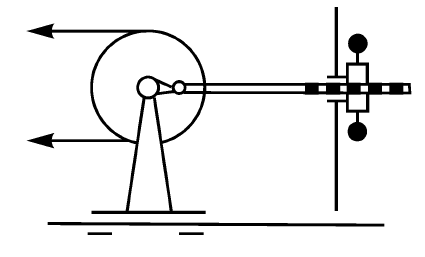
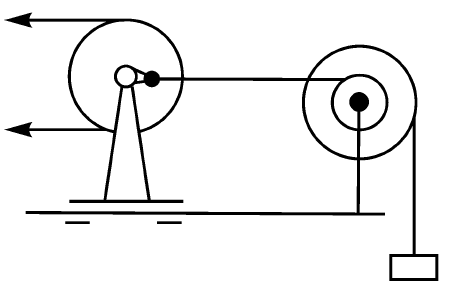
В состав приводной станции входит электродвигатель с системой управления, передаточный механизм и приводной элемент (барабан, звездочка, блок и др.). Приводные элементы могут быть фрикционными и с зацеплением (рис. 19.2 а, б). Выбор места расположения приводной станции определяется стремлением максимально уменьшить усилие на тяговом органе, а также удобством эксплуатации.
Натяжные станции могут быть прерывного (винтовые, рис. 19.2 б) и непрерывного (пружинные, грузовые, рис. 19.2 г и рис. 19 д) действия. В транспортерах большой длины натяжную станцию обычно устанавливают в начале груженой ветви, а приводную − в конце.
|
|
| ||
| а) | б) | ||
 |
|  | |
| в) | г) | д) | |
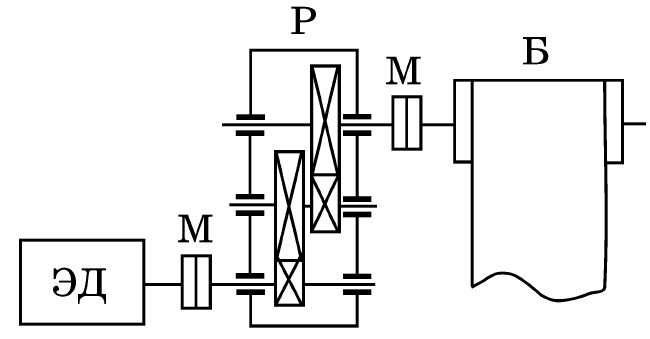
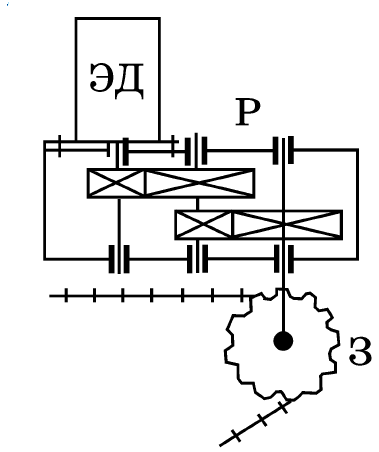
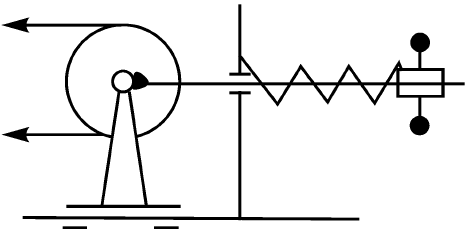
Рис. 19.2. Приводные (а, б) и натяжные (в, г, д) станции транспортеров:
а −фрикционные; б − с зацеплением; в − винтовые; г −пружинные;
д – грузовые
Режимы работы таких механизмов могут быть различными −S1, S2 и S3, в зависимости от назначения. Особое место в работе привода занимает пусковой режим. При этом на длительность пуска, пусковые токи и потери, динамические нагрузки влияют способы пуска электродвигателя, момент сопротивления на валу, загрузка транспортера, зазоры в механических передачах, длина и степень обтянутости тягового органа (ленты, цепи).
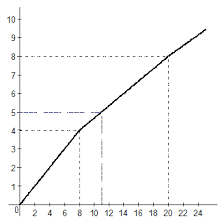
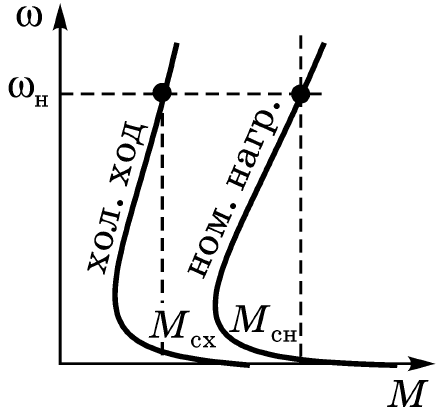
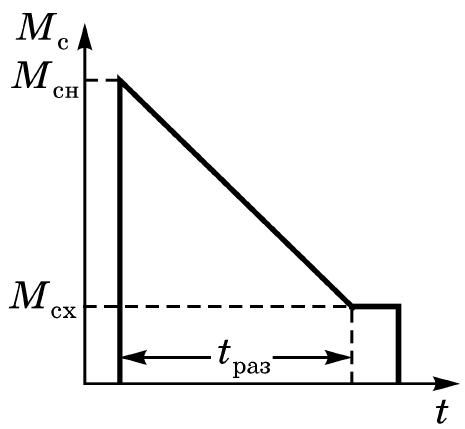
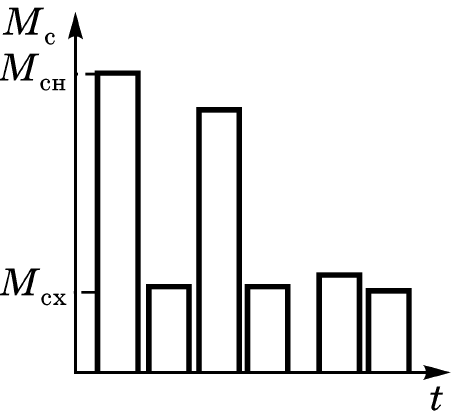
На рис.19.3 приведены механические характеристики горизонтального транспортера (рис.19.3 а) при загрузке и на холостом ходу и нагрузочные диаграммы (рис.19.3 б - г). График (рис.19.3 б) характерен для навозоуборочных транспортеров.
 |  |  |
| а) | б) | в) |
 |  |  |
| г) | д) | е) |
Рис. 19.3. Приводные характеристики транспортеров:
а − механические; б-е нагрузочные
По мере движения транспортер разгружается, время разгрузки
t раз= l / v, (19.1)
где l — длина транспортера, м; v — скорость движения тягового органа, м/с.
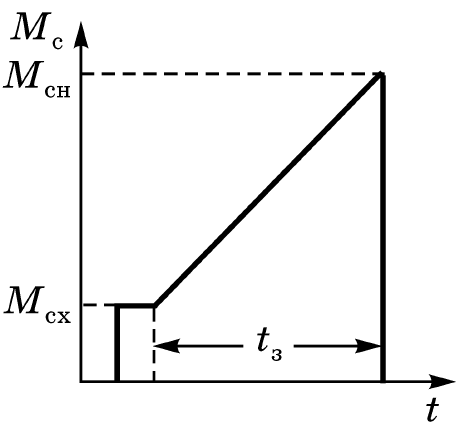
Диаграмма на рис.19.3вхарактерна для кормораздаточных механизмов, когда загрузка производится в одном месте и груз распределяется при движении по всей длине, время загрузки − по формуле 19.1.
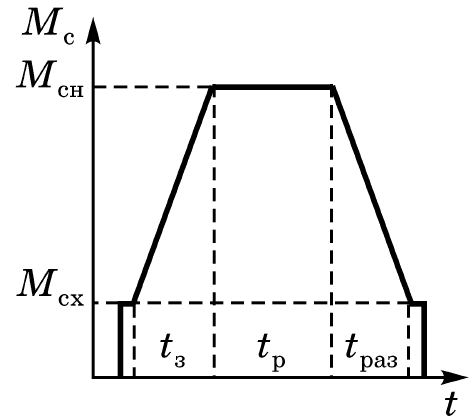
Диаграмма на рис.19.3 г включает участки загрузки, выгрузки и движения с установившимся моментом (t p). По такой схеме работают транспортеры по перемещению грузов из одной точки в другую.
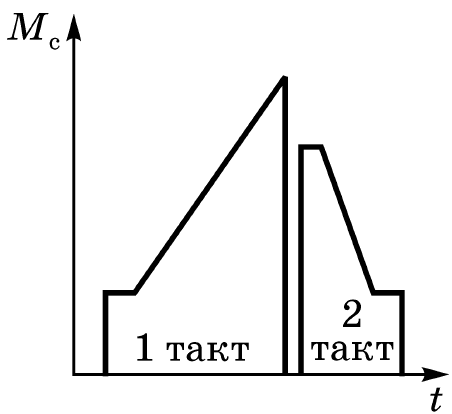
Диаграмма на рис.19.3 д характерна для кормораздаточного транспортера с замкнутым цепочно-скребковым контуром. На рис.19.3 е приведена диаграмма навозоуборочного скребкового транспортера, работающего по циклу (рис.19.3 д).
В сельскохозяйственном производстве применяются в основном транспортеры с низкими скоростями перемещения, механические передачи имеют высокие передаточные отношения. Поэтому приведенный момент инерции зачастую невелик и эта составляющая слабо сказывается на режиме пуска.
Расчет мощности электродвигателя приводов транспортеров начинают с определения статических нагрузок, т. е. сопротивления движению, строят нагрузочную диаграмму. Затем определяют мощность двигателя. Выбранный по условиям нагрева электродвигатель проверяют по условиям пуска и перегрузочной способности.