 2020-04-12
2020-04-12 1173
1173
Для каждого типа транспортера статические нагрузки рассчитывают по конструктивным параметрам и кинематической схеме.
Нории или ковшовые элеваторы (рис.19.1 а) предназначены для подъема сыпучих материалов в вертикальном направлении (или при некотором отклонении от вертикали).
В качестве тягового органа используются цепи и ленты с ковшами, ведущие и ведомые звездочки (барабаны). Ведущая звездочка (барабан) приводится в действие электродвигателем через редуктор.
Производительность нории, кг/с, и мощность электродвигателя, Вт, в длительном режиме:
Q = j v ug/ l,
Р = gQH /hнhп, (19.2)
где j − коэффициент заполнения ковшей (j =0,75-0,9 для зерна и j =0,33 для продуктов помола); u − вместимость одного ковша, м3; l − расстояние между ковшами; v − скорость движения (для зерна v =2-4 м/с, для муки − 1-1,5 м/с, для корнеклубнеплодов − 0,3-0,5 м/с); g − насыпная плотность транспортируемого материала, кг/м3; H − высота подъема, м; g =9,81 м/с2; hн − КПД нории (для вертикального перемещения 0,5-0,7,а для наклонного 0,3-0,4); hп − КПД передачи от двигателя к нории.
Момент трогания нории без нагрузки составляет около 10% номинального момента сопротивления, момент трогания под нагрузкой может быть до 1,4 М н. Поэтому прямой пуск осуществляют при незаполненных ковшах.
Механические характеристики нории представлены на рис. 19.4. Энергия приводной станции расходуется на преодоление сопротивления от перемещения груза и тягового органа. Сопротивление перемещения обусловлено силами трения во всех движущихся элементах, а также составляющими сил тяжести груза на наклонных участках.
Силы сопротивления движению, определяющие мощность электродвигателя в установившемся режиме, зависят от натяжения тягового органа, коэффициентов трения и загрузки.
Скребковые транспортеры (рис. 19.1 б) используются для перемещения зерна, корнеклубнеплодов, силосной массы, кормов, навоза. Груз по желобу перемещают скребки, укрепленные на одной или двух кольцевых цепях, движущихся со скоростью 0,3¸2,5 м/с. Производительность (кг/с) скребкового транспортера:
Q = К ajgВНu, (19.3)
Где К a− коэффициент, учитывающий степень заполнения скребков в зависимости от угла наклона a транспортера к горизонту (для легкосыпучих грузов К a= 1-0,0175a, для плохосыпучих К a= 1,05-0,01a), a − град.; j − коэффициент заполнения, j = 0,6¸0,8; g− насыпная плотность груза, кг/м3 (корнеклубнеплоды − 450 кг/м3, зерно − 450¸750 кг/м3, силос − 270 кг/м3, навоз − 1000 кг/м3); В − ширина скребков, м; Н − высота скребков, м; v − скорость движения (от 0,50 до 0,25 м/с, в зависимости от перемещаемого материала).
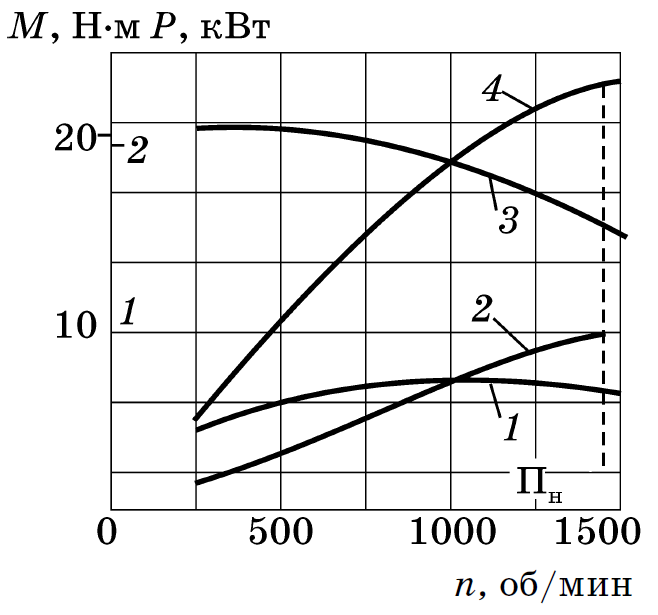
Рис. 19.4. Механические характеристики зерновой нории НЗ-20: 1 −момент холостого хода; 2 − мощность холостого хода; 3 − нагрузочный момент; 4 −мощность при нагрузке
Необходимая мощность электродвигателя для привода транспортера, Вт:
Р эд=9,81 Q (H+f с L cosa)/hп, (19.4)
где Н − высота подъема; f − коэффициент сопротивлении движению (табл. 19.1) в зависимости от типа цепи и производительности; L — длина транспортера, м; hп = 0,75-0,85 − КПД передачи.
Таблица 19.1. Коэффициент сопротивления движению
| Тип цепи | Производительность, т/ч | |||||
| 5 | 10 | 20 | 30 | 40 | 50 | |
| Втулочно-роликовая | 2,2 | 1,6 | 1,2 | 1,1 | 1,0 | 1,0 |
| Крючковая | 4,2 | 3,0 | 2,2 | 1,8 | 1,5 | 1,2 |
Горизонтальный скребковый транспортер для зерна с погруженными скребками. Мощность электродвигателя для установившегося режима, кВт,
Р =(Р 1+ Р 2)/hп=(Р уд1 L u+ Р уд2 LQ)/hп, (19.5)
где Р уд1 − удельная мощность, необходимая на перемещение тягового органа длиной 1м по горизонтали со скоростью 1м/с, кВт/(м2/с) (для зерна и зернопродуктов Р уд 1 =0,08 кВт/(м2/с), Р уд2 –удельная мощьность, необходимая для перемещения продукта при производительности 1 т/ч на расстояние 1 м в горизонтальном направлении, кВт/(м∙т/ч), (для зерна Р уд2 = 0,003 кВт/(м т/ч)), Р 1 = Р уд1 L u, Р 2= Р уд2 LQ; hп − КПД передачи; Q вычисляется по формуле 19.3 с учетом того, что j»1.
Винтовой транспортер (шнек) для зерна. Мощность двигателя для привода винтового транспортера, Вт,
P = КgQ (f c L 1+ H)/hп, (19.6)
где Q − производительность, кг/с; К =1,2¸1,5 − коэффициент, учитывающий угол наклона транспортера (при a =20°, К =1; a =45°, К =1,4; a =90°, К =2,5); L − длина перемещения продукта, для наклонного транспортера − горизонтальная проекция, м; f c − коэффициент сопротивления перемещению материала по кожуху (для зерна, продуктов помола, кормов − К =1,2¸1,3; для навоза − К =2,5¸4).
Производительность шнекового транспортера, кг/с,
Q = 0,25p (D 2– d 2) Sп шgКuy С, (19.7)
где D − наружный диаметр винта, м; d − диаметр вала, м; п ш − частота вращения вала шнека, об/с; g − насыпная плотность материала, кг/м3; К − коэффициент, учитывающий отставание осевой скорости материала от скорости шнека, К = 0,9¸0,6, зависит от рода груза и быстроходности; y − коэффициент заполнения винта (для зерна − 0,25¸0,35, для муки − 0,25¸0,30, для полужидких кормовых смесей − 0,9¸1,0, для корнеплодов ~0,4, для навоза − 0,6¸0,8); С − коэффициент снижения производительности с увеличением угла a наклона шнека к горизонту (табл. 19.2).
Таблица 19.2. Значения коэффициент снижения производительности с увеличением угла a
| a,° | 0 | 5 | 10 | 15 | 20 | 30 | 40 | 50 | 60 | 90 |
| С | 1 | 0,9 | 0,8 | 0,71 | 0,65 | 0,58 | 0,52 | 0,48 | 0,44 | 0,3 |
Инерционный транспортер для зерна представляет собой желоб, совершающий возвратно-поступательные колебания под действием привода (кривошипно-шатунного механизма, линейного двигателя, благодаря чему продукт перемещается по нему. Мощность двигателя, кВт,
Р = Р уд1 QL /hп, (19.8)
где Р уд1 − мощность, необходимая для перемещения продукта при производительности 1 т/ч на расстояние 1м по горизонтали, кВт/(м∙т/ч), Р уд1 =0,03 кВт/(м∙т/ч); hп − КПД передачи; Q − производительность, т/ч.
Ленточные транспортеры используют для перемещения сыпучих, кусковых, штучных грузов в горизонтальном или наклонном направлении. Максимальный угол подъема составляет 20° для зерна, для гороха − 12°, для муки − 24°, для силоса и других кормов − 20°.
Приводная станция транспортера состоит из электродвигателя, редуктора, ведущего барабана, а натяжная станция − из барабана и натяжного устройства. Лента поддерживается равномерно распределенными по длине роликами. Тип передачи (ременная, зубчатая, редуктор) определяется передаточным отношением и условиями работы.
Производительность транспортера, кг/с,
Q = gu S = q u, (19.9)
где g − насыпная плотность материала, кг/м3; u − скорость движения ленты, м/с; S — площадь поперечного сечения слоя материала на ленте, м2 (при равномерной загрузке). Загрузка ленты q, кг/м, будет
q =g S; Q = q u. (19.10)
При неравномерной загрузке
q = m / l, (19.11)
где m − масса, кг; l − длина, м.
Мощность двигателя (Вт) для установившегося режима
Р = F u/hп, (19.12)
где u− скорость движения ленты, м/с.
Суммарная сила сопротивления движению, Н,
F = F п + F б, (19.13)
где F п − сила сопротивления на прямолинейном участке; F б − сила сопротивления при огибании барабана.
Сила сопротивления на прямолинейном участке движения по настилу
F пн=9,81 (q + q л) L (f нcosa+sina), (19.14)
где q − загрузка транспортера, кг/м; q л − масса ленты, кг/м; a − угол подъема; f н − коэффициент сопротивления движению ленты с настилом, f н =0,4¸0,7 для стального и деревянного настилов. При роликовых опорах
F п.р.=[9,81(q + q л+ q р) f рcosa+9,81(q + q л)sina], (19.15)
где q р − погонная масса роликов нагруженной ветви, кг/м; f р − коэффициент сопротивления движению по роликам (для плоской ленты - f р = 0,018¸0,035; для желобчатой - f р = 0,02¸0,04; при этом большие значения − для худших условий работы).
Сила сопротивления движению при огибании барабанов
F б=e S наб К б, (19.16)
где e =0,06¸0,09 − коэффициент местного сопротивления, S наб − усилие натяжения набегающей ветви ленты, Н, К б − число барабанов.
Транспортеры для уборки навоза (рис. 19.5) работают в кратковременном режиме S3. Условия эксплуатации этих механизмов тяжелые: пуски под нагрузкой, повышенная влажность, химически агрессивная среда, значительные колебания момента сопротивления. Эти особенности следует учитывать при выборе электрооборудования, и прежде всего электродвигателя, по мощности, исполнению, условиям пуска и перегрузочной способности.
Мощность двигателя для цепочно-скребкового навозного транспортера, Вт,
Р = F u/hп, (19.17)
где F − полное усилие на цепи, Н; u − скорость цепи, м/с. Для расчетов принимаются u =0,15¸0,2 м/с и hп =0,75¸0,85.
Полное сопротивление движению, Н,
 , (19.18)
, (19.18)
где Q сут − суточный выход навоза, кг/сут; К уб − число включений транспортера для уборки навоза в течение суток; К =3¸5 − коэффициент, учитывающий неравномерность накопления навоза в интервалах между уборками и добавочные усилия, связанные с движением навоза по каналу; f 1 − коэффициент трения навоза о желоб, зависит от материала желоба и подстилочного материала, f 1 =0,8¸1,2; р −усилие, приходящееся на один скребок, р =15¸30 Н; tc − шаг скребков, tc =0,2¸1,0 м; f 2 = 0,4¸0,5 − опытный коэффициент; т т − масса транспортера длиной 1 м.
В табл. 19.3 приведены технические характеристики скребкового транспортера ТСН-160.
Таблица 19.3. Техническая характеристика транспортера ТСН-160
| Наименование и единицы измерения показателя | Значение |
| Подача, т/ч | 4,5 |
| Установленная мощность, кВт | 5,5 |
| Скорость движения, м/с | 0,18 |
| Длина цепи горизонтального транспортера, м | 160 |
| Масса транспортера, кг | 1890 |

Рис. 19.5. Транспортер скребковый навозоуборочный ТСН-160А:
1 − наклонный транспортер; 2 − шкаф управления; 3 − привод горизонтального транспортера; 4 − натяжное устройство; 5, 6 − поворотные устройства; 7 − кронштейны; 8− скребок; 9 − цепь.

