 2020-04-12
2020-04-12 692
692Антенна радиолокатора А (рис. 12.7) осуществляет азимутальное сканирование. Канал азимутального привода антенного блока состоит из АДД M1 с обмотками 1 - 2, 3 - 4, понижающего редуктора с передаточным отношением u1, решающего вращающегося трансформатора М2 и вращающегося трансформатора развертки МЗ (с обмотками 13 - 15, 14 - 16, 17 - 19, 18 - 20).
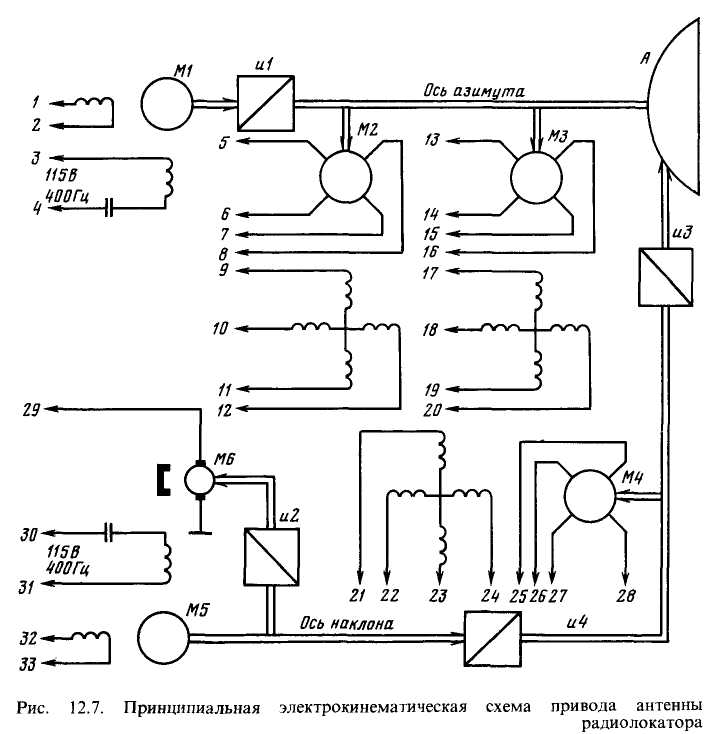
Управляемый двигатель M1 вращается без реверса. Непрерывное вращение двигателя преобразуется в секторное качение рефлектора антенны с помощью кривошипно-коромыслового механизма. На обмотку возбуждения 3 - 4 двигателя M1 подается напряжение 115 В, 400 Гц, а на его обмотку управления 1 – 2 - пониженное напряжение от блока стабилизации и управления. Значение этого напряжения зависит от режима работы радиолокатора. На обмотку 1 - 2 может подаваться и постоянное напряжение для торможения антенны и фиксации ее в определенном положении.
Вращающийся трансформатор М2 (с обмотками 5 - 7, 6 - 8, 9 - 11, 10 - 12) служит для получения напряжения, амплитуда которого пропорциональна мгновенному значению требуемого угла наклона луча антенны в системе косвенной его стабилизации, определяемому по формуле δ’=γ·sinα-θ·cosα, где γ, θ, α - текущие углы крена самолета, тангажа, азимутальный поворот рефлектора соответственно. Данное напряжение получают за счет напряжения крена, подаваемого на синусную обмотку трансформатора от самолетной гировертикали, а на косинусную — напряжения тангажа. Требуемый для совмещения луча с горизонтальной плоскостью угол δ наклона отражателя меньше полученного значения δ’ в постоянное число раз KА =δ’/δ, определяющее, во сколько раз угол отклонения оси диаграммы направленности антенны превышает угол поворота рефлектора относительно облучателя. Этот коэффициент учитывается введением редукции между осью наклона отражателя и вращающимся трансформатором М4 отработки наклона.
Снимаемое с роторной обмотки 6 - 8 вращающегося трансформатора М2 и пропорциональное требуемому углу δ’ напряжение поступает далее в блок стабилизации и управления, где сравнивается с напряжением, пропорциональным действительно имеющемуся в данный момент значению угла наклона отражателя, получаемому от трансформатора М4.
Канал управления отражателя антенны по наклону предназначен для непрерывного совмещения оси диаграммы направленности с плоскостью горизонта или другой заданной плоскостью при крене и тангаже самолета, а также для дистанционного задания угла наклона плоскости, с которой производится совмещение, в пределах углов ±10° относительно горизонта. Канал наклона состоит из асинхронного двухфазного электродвигателя М5 с обмотками 30 - 31, 32 - 33, редуктора с передаточным отношением иЗ, редуктора отношением и4, трансформатора М4, тахогенератора постоянного тока М6, редуктора с передаточным отношением и2. Двигатель М5 перемещает отражатель в плоскости наклона. Его вращением управляет блок стабилизации и управления изменением амплитуды и фазы подаваемого на обмотку управления 32 – 33 переменного напряжения. Трансформатор М4 с обмотками 21 - 23, 22 - 24, 25 - 27, 26 - 28 работает в качестве приемника в системе дистанционной передачи, служащей для ручного наклона плоскости стабилизации, а также является датчиком истинного текущего угла наклона рефлектора и используется в следящей системе гиростабилизации в качестве датчика отработки. Сигнал рассогласования во всех случаях поступает с его статорной обмотки в блок стабилизации и управления. Тахогенератор М6 - элемент ООС, которая нужна в следящей системе наклона отражателя для придания ей определенных динамических свойств. Напряжение с якорной обмотки тахогенератора 29 подается в магнитно-тиристорный усилитель блока стабилизации и управления. Выводы обмоток 1 - 2, 5 - 29, 32 - 33 подсоединены к блоку стабилизации и управления.
|
|
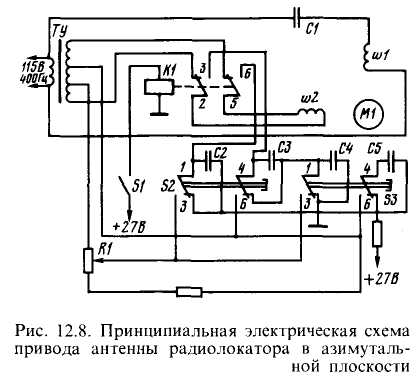
Сканирование антенны в азимутальной плоскости производится АДД M1 (рис. 12.8), обмотка возбуждения которого w1 питается от сети через фазосдвигающий конденсатор С1. На обмотку управления w2 подается пониженное напряжение от трансформатора Т1 через контакты реле К1. Во всех режимах, кроме режима «Снос», реле К1 обесточено, и двигатель, получая питание, вращается непрерывно в одном направлении. Радиолокатор в режим «Снос» переводят включением переключателя S1. При этом срабатывает реле К1 и своими контактами 2 - 3, 5 - 6 включает обмотку управления w2 на постоянное напряжение 27 В через контакты 1 - 3, 4 - 6 кнопки S2 и контакты 1 - 3 кнопки S3. Это обеспечивает эффективное электродинамическое торможение двигателя M1 и надежную фиксацию антенны в заданном азимутальном положении. В таком положении измеряют угол сноса. Кнопки S2, S3 служат для управления поворотом антенны в режиме «Снос». Скорость перемещения антенны регулируют потенциометром R1, стоящим на оси рукоятки «Контраст». При нажатии кнопки С2 двигатель выполняет реверс из-за смены концов вторичной обмотки Т1. Конденсаторы С2 - С5 служат для искрогашения.
Схема управления наклоном рефлектора антенны представлена на рис. 12.9.
|
|
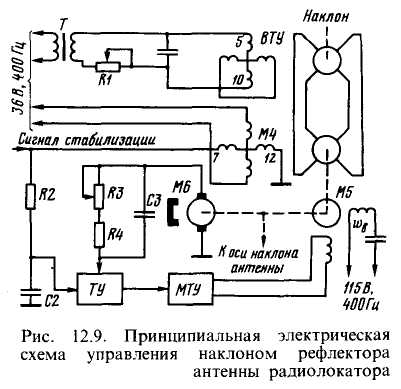
Питающее напряжение 36 В, 400 Гц через трансформатор Т подводится на статорные обмотки 5 - 10 вращающегося трансформатора управления ВТУ. На оси его ротора расположена рукоятка «Наклон». Амплитуду питающего напряжения трансформатора ВТУ регулируют потенциометром «Масштаб» R1. Обмотки трансформатора ВТУ соединены последовательно с роторными обмотками следящего элемента М4 схемы, ротор которого приводится во вращение от двигателя М5 наклона рефлектора антенны. При несовпадении осей трансформатора ВТУ и элемента М4 в статорной обмотке 7 - 12 последнего наводится напряжение, представляющее собой ошибку рассогласования в замкнутой системе управления положением рефлектора антенны. Напряжение ошибки рассогласования с цепочки R2, С2 поступает на вход транзисторного усилителя ТУ.
После магнитно-тиристорного усилителя МТУ сигнал идет на обмотку управления WУ двигателя М5. Двигатель наклона вращает рефлектор антенны до тех пор, пока оси элемента М4 и трансформатора ВТУ не совпадут, что будет характеризоваться отсутствием сигнала ошибки на входе усилителя ТУ. Реверсирование двигателя М5 производится за счет изменения фазы напряжения на обмотке WУ. Сосью исполнительного двигателя М5 связан ротор тахогенератора М6, напряжение с которого, пропорциональное скорости вращения двигателя наклона, вводится через цепочку R3, R4, СЗ в усилитель ТУ в качестве напряжения ОС. Глубину ОС устанавливают потенциометром R3. Автоколебания рефлектора по скорости относительно положения, заданного ручкой «Наклон», исключает ООС.
Схема привода стабилизации антенны в плоскости обзора дана на рис. 12.10.
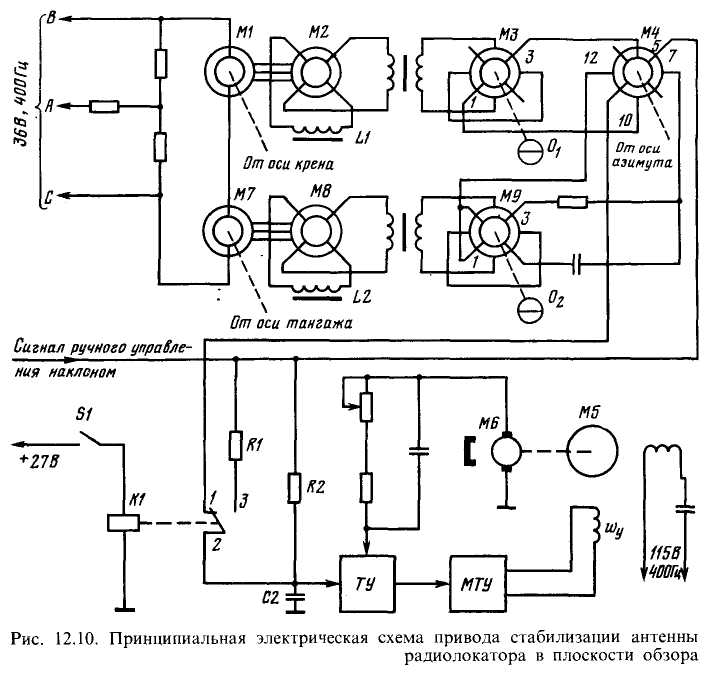
Сельсины M1, M7 находятся в гиродатчике, а их роторные обмотки питаются от сети 36 В, 400 Гц. Сигналы, пропорциональные углам крена и тангажа самолета, снимаются с трехфазных обмоток этих сельсинов в виде трехфазных напряжений, которые преобразуются сельсинами М2, М8 в однофазные напряжения с изменяющейся амплитудой. Для согласования преобразующего сельсина М2 (M8) с согласующим вращающимся трансформатором МЗ (М9) одна из роторных обмоток М2 (М8) замкнута через дроссель L1 (L2). Трансформаторы МЗ, М9 определяют масштаб и фазу выходного напряжения. Сигнал, пропорциональный крену самолета, поступает на вход трансформатора МЗ, работающего в режиме масштабного трансформатора. Изменение масштаба сигнала крена равно 0-1. Сигнал, пропорциональный тангажу, поступает на вход трансформатора М9, выполняющего роль фазовращателя. Настраивают схему разворотом роторов трансформаторов МЗ, М9 с помощью самотормозящихся осей О 1 О 2со шлицами. Включение согласующих вращающихся трансформаторов позволяет устранить разницу в масштабе и фазе сигналов, идущих от самолетной гировертикали.
С роторных обмоток 1 - 3 трансформаторов МЗ, М9 сигналы, пропорциональные углам крена γи тангажа θ, следуют в статорные обмотки 5 - 10, 7 - 12 решающего вращающегося трансформатора М4. В его роторной обмотке наводятся составляющие (1 /К)γsinα и
-(1 /К) θ sinα, так как его ротор с коэффициентом редукции 1/ К А связан с осью азимутального сканирования антенны. Выходное напряжение трансформатора М4 через контакты 1 - 2 реле К1 поступает на суммирующую цепочку R2, С2, стоящую на входе транзисторного усилителя ТУ. После магнитно-тиристорного усилителя МТУ напряжение, пропорциональное входному сигналу, подается на обмотку управления иу двигателя М5, который отклоняет рефлектор антенны на заданный угол. Таким образом, плоскость обзора стабилизируется наклоном рефлектора при изменении угла крена и тангажа самолета. Сигнал ручного управления наклоном рефлектора используют для задания нужной плоскости стабилизации луча.
В схеме предусмотрена возможность отключения стабилизации (это необходимо, например, при взлете самолета или при неисправности гиродатчика) с помощью выключателя «Резервная стабилизация» S1. При срабатывании реле К1 вместо сигнала стабилизации на вход усилителя ТУ подключается эквивалент нагрузки R1. При этом работа схемы управления наклоном рефлектора не нарушается. Двигатель М5 реверсируется при изменении фазы управляющего сигнала.
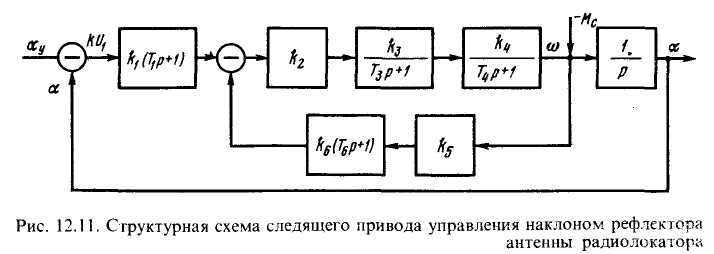
Структурная схема (рис. 12.11), соответствующая принципиальной схеме, представленной на рис. 12.9. позволяет оценить точность и устойчивость работы следящего привода наклона рефлектора антенны. На ней обозначено: αу - заданное положение оси наклона рефлектора антенны; α - действительное положение оси наклона антенны; к - коэффициент пропорциональности между углом рассогласования ∆α и напряжением, снимаемым с обмотки 7 - 12 элемента М4; U 1 - напряжение рассогласования, определяемое по формуле U 1 =к(ау -α); k1, Т 1 - коэффициент усиления и постоянная времени дифференцирующего контура; к2 - коэффициент усиления транзисторного усилителя; к3, Т3 - коэффициент усиления и постоянная времени магнитно-тиристорного усилителя МТУ; к 4, Т 4 - коэффициент усиления и постоянная времени электродвигателя (Т 4 = J /β где J — момент инерции вращающихся частей, приведенный к валу двигателя; β - жесткость механической характеристики двигателя; М С - нагрузочный момент на валу двигателя; к5 - коэффициент усиления тахогенератора; к 6, Т 6 - коэффициент усиления и постоянная времени дифференцирующего контура в цепи обратной связи.
Передаточная функция разомкнутой системы имеет вид:
 .
.
Зависимость угла наклона рефлектора антенны от действия возмущения записывают следующим образом:
α =(ау - а) W (р) - Мс (1/р). (12.3)
При ау =0 привод является астатической системой по отношению к управляющему воздействию, а статическая ошибка х от действия возмущения М С определится из выражения (12.3) при ау =0, ау =- х находят по такому уравнению: х=MС/ (kk1k2k3k4). Из этого уравнения видно, что для повышения точности работы привода следует увеличивать коэффициенты усиления к, к2, к3, но при этом нельзя допускать выход привода на неустойчивый режим.
Передаточная функция замкнутой системы
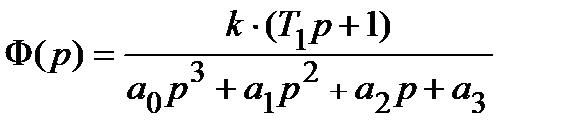 ,
,
где К=k; к1; к2; к3; к4; К 1 = к2,к3, к4, к5,к6;
а0 = Т 3 Т 4; a1 = T 3 + T 4 + Т 6 К 1; а2 = Т 1 К + К 1 + 1; а3 = К.
Для системы третьего порядка условием устойчивости является
а1а2 - а0а3 > 0 или (T 3 + T 4 + Т 6 К 1)(Т 1 К + К 1 + 1) > Т 3 Т 4 К.
Из данного неравенства следует, что для повышения устойчивости работы
привода необходимо снижать значения к, к 1 Т 3, Т 4 и увеличивать значения k 5, к 6, Т 1. Уменьшение Т 4=J/β в приводах достигают уменьшением J (тонкостенный алюминиевый стакан в АДД и повышением жесткости β механической характеристики двигателя.








