 2020-04-12
2020-04-12 181
181
Пусть разностное уравнение для неслучайного полезного сигнала имеет следующий вид:
 , (13.15)
, (13.15)
где  - скорость изменения сигнала;
- скорость изменения сигнала;
 - интервал дискретизации.
- интервал дискретизации.
 Разностному уравнению соответствует модель полезного сигнала в виде полинома первого порядка:
Разностному уравнению соответствует модель полезного сигнала в виде полинома первого порядка:
 , (13.16)
, (13.16)
где  ,
,  - некоторые параметры неслучайного полезного сигнала (начальное значение, скорость изменения).
- некоторые параметры неслучайного полезного сигнала (начальное значение, скорость изменения).
Рисунок 13.2 – модель полезного и наблюдаемого сигналов
Параметры , должны быть оценены по результатам измерений  ,
,  . Минимизируемый критерий в данном случае запишется следующим образом:
. Минимизируемый критерий в данном случае запишется следующим образом:
 . (13.17)
. (13.17)
В качестве оценок МНК будем использовать те значения параметров модели  и
и  , для которых критерий оптимальности минимален или производные критерия оптимальности равны нулю:
, для которых критерий оптимальности минимален или производные критерия оптимальности равны нулю:
 ; (13.18)
; (13.18)
 . (13.19)
. (13.19)
Результаты дифференцирования по оцениваемым параметрам имеют вид:
 ;
;
 .
.
После выполнения операции суммирования с точностью до несущественных постоянных множителей получим:
 ;
;
 .
.
Таким образом, получена система двух линейных уравнений относительно искомых параметров и . Решение системы имеет следующий вид:
 ;
;
 .
.
Учтем следующие выражения:
 ;
;  .
.
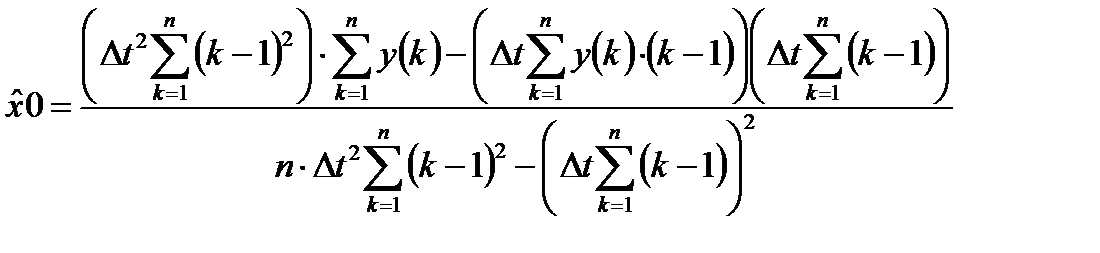
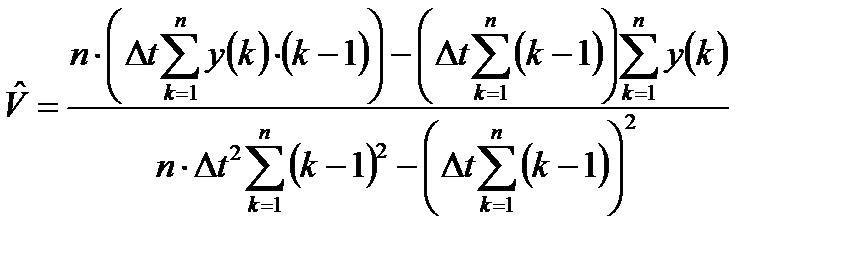
Оптимальные оценки параметров полезного сигнала методом МНК примут следующий окончательный вид:
 ; (13.20)
; (13.20)
 , (13.21)
, (13.21)
где  ;
;
 .
.
Соответственно, оценка сигнала на момент последнего измерения запишется следующим образом:
 , (13.22)
, (13.22)
где  .
.
Экстраполированное значение оценки сигнала на один дискрет времени вперед определяется выражением:
 , (13.23)
, (13.23)
где  .
.
Рисунок 13.3 - Оценивание методом МНК, экстраполяция
Дисперсии полученных оценок скорости  , фильтрованного
, фильтрованного  и экстраполированного
и экстраполированного  сигналов с учетом некоррелированности шумов наблюдения
сигналов с учетом некоррелированности шумов наблюдения  в различных дискретах времени запишутся в виде:
в различных дискретах времени запишутся в виде:
 ,
,
 , (13.24)
, (13.24)
 .
.
Оценивание методом рекуррентной фильтрации
Рекуррентные уравнения оптимальной фильтрации могут быть получены в результате взвешенного суммирования экстраполированного значения сигнала с текущим рассогласованием:
 , (13.25)
, (13.25)
где  - коэффициент фильтрации по положению сигнала.
- коэффициент фильтрации по положению сигнала.
Вес текущего рассогласования  стремится к нулю, если экстраполированная оценка является идеальной (
стремится к нулю, если экстраполированная оценка является идеальной ( ), и стремится к единице, если идеальным является текущий входной сигнал (
), и стремится к единице, если идеальным является текущий входной сигнал ( ). В последнем случае выражение (13.25) принимает вырожденный вид:
). В последнем случае выражение (13.25) принимает вырожденный вид:  .
.
Результирующие уравнения оптимальной дискретной линейной фильтрации имеют следующий рекуррентный вид:
 , (13.26)
, (13.26)
 , (13.27)
, (13.27)
 , (13.28)
, (13.28)
 , (13.29)
, (13.29)
 ,
,
 ,
,
где  - экстраполированное значение измеряемого дискретного сигнала;
- экстраполированное значение измеряемого дискретного сигнала;
- коэффициент фильтрации по положению сигнала;
 - измеренное значение скорости изменения дискретного сигнала;
- измеренное значение скорости изменения дискретного сигнала;
 - экстраполированное значение скорости изменения дискретного сигнала;
- экстраполированное значение скорости изменения дискретного сигнала;
 - коэффициент фильтрации по скорости сигнала.
- коэффициент фильтрации по скорости сигнала.
Рисунок 13.4 - Оценивание реккурентным методом
Структурная схема оптимального линейного дискретного фильтра сигнала с постоянным приращением имеет следующий вид: рисунок 13.5.
В соответствии с рисунком 13.5 фильтр для фильтрации сигнала с постоянным приращением представляет собой дискретную следящую систему с двумя цифровыми интеграторами в разомкнутой цепи, измерением скорости приращения и переменными коэффициентами фильтрации контуров по положению и скорости.
Рисунок 13.5 – структурная схема рекуррентной оптимальной линейной фильтрации сигнала с постоянным приращением








