 2020-05-12
2020-05-12 416
416 Основные законы трения носят приближенный характер. Они установлены Кулоном для сухого трения.
Основные законы трения носят приближенный характер. Они установлены Кулоном для сухого трения.
 Пусть тело, весом G, лежит на горизонтальной шероховатой поверхности (рисунок 9.1). Приложим к телу силу P. Если
Пусть тело, весом G, лежит на горизонтальной шероховатой поверхности (рисунок 9.1). Приложим к телу силу P. Если
значение силы P будет незначительное, то тело будет оставаться неподвижным, т.е. в равновесии. Следовательно, появляется некая сила, до некоторого момента равная по модулю и противоположно направленная

вектору P, удерживающая тело. Эта сила называется силой трения
Fтр.
При отсутствии скольжения силу трения называют силой сцепления, которая изменяется:
0 £ F
£ F max.
тр тр
Максимальная сила сцепления пропорциональна нормальному давлению тела:
|
тр
fN.
где f – коэффициент трения покоя (коэффициент сцепления).
Максимальная сила сцепления в широких пределах не зависит от площади трущихся поверхностей, а коэффициент сцепления зависит от характера трущихся поверхностей, а так же от их агрегатного состояния.
После того, как тело начнет перемещаться, сила трения скольжения будет частично компенсировать действие силы P. Модуль силы трения скольжения будет несколько меньше, чем модуль максимальной силы
сцепления так как
f > fск.
Угол и конус трения

 Пусть на тело, находящееся в покое (рисунок 9.2), действуют активные силы: G – вес тела; P – горизонтальная сила, пытающаяся сдвинуть
Пусть на тело, находящееся в покое (рисунок 9.2), действуют активные силы: G – вес тела; P – горизонтальная сила, пытающаяся сдвинуть
тело; Ra
– результирующий вектор от активных сил:
Ra = G + P.
Так как тело под действием результирующей Ra
Рисунок 9.2
остается в равновесии, значит, существует сила,
равная по модулю Ra
и противоположно ей направленная – реакция
шероховатой поверхности:
Rш = N + Fтр.
При F = F max, угол j называют углом трения.
тр тр
tgj =
max

|
N
= f.
В общем случае вектор силы P можно направить как угодно в
плоскости параллельной поверхности трения, поэтому вектор
Rш,
|
отклоняющийся на угол j от вектора N, образует конус трения. До тех
пор, пока линия действия результирующего вектора от активных сил Ra
будет лежать в пределах конуса трения, тело будет оставаться неподвижным.
Fтр
Трение качения
На рисунке 9.3, на первый взгляд, пара сил P и ничем не уравновешенны, поэтому цилиндр
 Рисунок 9.3
Рисунок 9.3
должен начать катиться при любой малой активной силе P. Но это идеальные условия! В действитель- ности, качение начинается при достижении силой P определенного предельного значения.
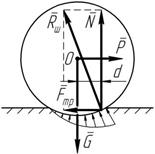
Рисунок 9.4
На рисунке 9.4 видно, что контакт цилиндра с поверхностью, по которой он катится, происходит по дуге. Поэтому, нормальная реакция N отстоит от центра цилиндра на расстоянии d, которое зависит от физических свойств поверхности. Предельное значение плеча d называется коэффициентом трения качения:
d = d max.
В отличие от коэффициента трения сцепления (скольжения), который является безразмерной величиной, коэффициент трения качения измеряется в единицах длины [м].
На рисунке 9.5 дана схема сил исходя из абсолютной твердости тел, но с учетом момента сопротивления качению:
 Mc = d N.
Mc = d N.
Рассмотрим предельное равновесие катка, с учетом трения сцепления и трения качения:
ìå P
= P - F max = 0;
ix тр
ï
|
Рисунок 9.5
ïå M
A (Pi )= - PR + M c
= 0.
Из данных уравнений видно, что скольжение начнется, если
P > F max,
|
fN.
Качение начнется, если
P > M c
 R
R
или
P > d N .
R
Но так как, обычно
d <<
R
f, то качение начнется раньше скольжения.
В связи с этим, в машиностроении энергетически выгодно заменять подшипники скольжения подшипниками качения.








