 2020-05-13
2020-05-13 129
129Составим дискретную модель системы управления. Системе дифференциальных уравнений (b), (c), (d) соответствуют разностные уравнения:
 ; (3.1)
; (3.1)
 ; (3.2)
; (3.2)
 ; (3.3)
; (3.3)
 ; k =1, 2, …, N. (3.4)
; k =1, 2, …, N. (3.4)
В цикле по переменной  решить на ЭВМ систему уравнений (3.1)-(3.4), (5) с помощью математического пакета Mathcad.
решить на ЭВМ систему уравнений (3.1)-(3.4), (5) с помощью математического пакета Mathcad.
Построить графики переходных процессов для управляемой переменной  , требуемого закона изменения управляемой переменной
, требуемого закона изменения управляемой переменной  , относительной погрешности управления
, относительной погрешности управления  % и управляющего воздействия
% и управляющего воздействия  .
.
На рис. 6 приведен график изменения относительной погрешности управления.
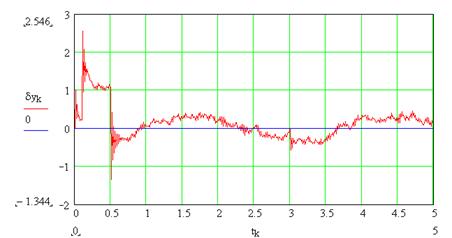
Рис.6. График изменения относительной погрешности управления
По графикам переходных процессов определить прямые показатели качества управления.
Вычислить среднее значение погрешности управления:
и среднее квадратическое значение погрешности управления за время управления:
 .
.
Составить отчет по результатам выполнения задания.
Список использованных источников
1. Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления. - СПб.: Наука, 2000. - 475 с.
2. Гольцов А. С. Адаптивные системы автоматического управления нелинейными объектами. - Орел: Академия ФАПСИ, 2002. – 156 c.
3. Гольцов А. С. Методы оптимизации и адаптивного управления в машиностроении. - Волгоград: ВПИ (филиал) ВолгГТУ, 2009. - 168 с.
4. Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. - М.: БИНОМ, 2004. - 911 с.
5. Калман Р., Фарб П., Арбиб М. Очерки по математической теории систем. - М.: Единореал, 2004. - 400 с.
Учебное издание
Владимир Васильевич Матвеев
Алексей Александрович Силаев
МОДЕЛИРОВАНИЕ СИСТЕМ И ПРОЦЕССОВ.
ЛАБОРАТОРНЫЙ ПРАКТИКУМ.
Методические указания
План электронных изданий 2016 г. Поз. № ___В
Подписано на «Выпуск в свет» __.__.__. Уч-изд. л. ___.
На магнитоносителе.
Волгоградский государственный технический университет.
400005, г. Волгоград, пр. Ленина, 28, корп. 1.








