 2020-05-13
2020-05-13 104
104
Система управления (рис. 1) имеет следующую модель:
 ; (a)
; (a)
 . (b)
. (b)
Составление модели системы управления в пространстве состояний
Из рисунка 2 видно, что в пространстве состояний регулятор можно описать уравнениями:
 ; (6)
; (6)
 , (7)
, (7)
где невязка (величина сигнала рассогласования)  определяется по формуле:
определяется по формуле:
 ; (8)
; (8)
 - вспомогательная переменная состояния регулятора.
- вспомогательная переменная состояния регулятора.
Из формул (2)-(8) видно, что система, образованная регулятором, объектом управления и измерительным устройством, имеет следующую математическую модель в пространстве состояний:
 ;
;
 ;
;
 ;
;
 .
.
Эту систему уравнений запишем в матричном виде:
 ; (I)
; (I)
 , (II)
, (II)
где:
 ;
;  ;
;  ;
;  ;
;  .
.
Таким образом, получена модель САУ в пространстве состояний в виде системы уравнений (I), (II) и (8).
Определение параметров ПИ-регулятора
Параметры ПИ-регулятора будут определены минимизацией функционала обобщенной работы

по переменной  с учетом ограничений, заданных уравнениями (I), (II), (III) и (8), где
с учетом ограничений, заданных уравнениями (I), (II), (III) и (8), где  - весовой коэффициент.
- весовой коэффициент.
Минимизация этого функционала по переменным  и
и  с учетом ограничений (I), (II) и (8) с помощью принципа максимума приводит к следующим уравнениям для оптимальных траекторий
с учетом ограничений (I), (II) и (8) с помощью принципа максимума приводит к следующим уравнениям для оптимальных траекторий  вектора переменных состояния
вектора переменных состояния  :
:
 ; (3.1)
; (3.1)
 , (3.2)
, (3.2)
где:
 ;
;  .
.
Из сравнения уравнений (I) и (3.1) получим алгоритм вычисления вектора функций , входящих в уравнения формирования управляющего воздействия  :
:
 ,
,
или (так как  ):
):
 . (3.3)
. (3.3)
Но из уравнений (6) и (7) видно, что
 . (3.4)
. (3.4)
Поэтому из выражений (3.3) и (3.4) получим следующий алгоритм настройки параметров ПИ-регулятора:
 . (3.5)
. (3.5)
Результаты вычислений при  приведены на графиках изменения оценок параметров ПИ-регулятора:
приведены на графиках изменения оценок параметров ПИ-регулятора:
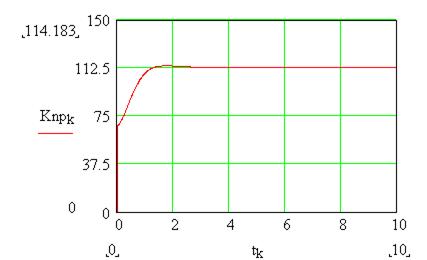
Рис.4. График изменения оценок параметра Kn
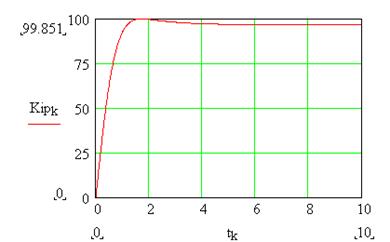
Рис.5. График изменения оценок параметра Ku
Из графиков видно, что получены состоятельные оценки параметров ПИ-регулятора. Окончательные значения оценок таковы:  ;
;  .
.








