2020-05-25
2020-05-25 165
165Произведем преобразование дифференциальных уравнений (2.7), (2.8), заменив фазные переменные на их составляющие в координатах d, q, 0.
Выразим ток, напряжение, потокосцепление фазы а из (2.7) через новые переменные, используя (1.4) раздела 1.2:


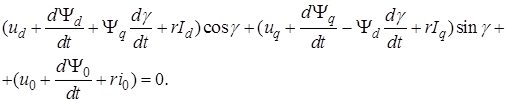
Подставим полученные соотношения в первое уравнение системы (2.7):

После перегруппировки слагаемых это выражение можно представить в виде
|
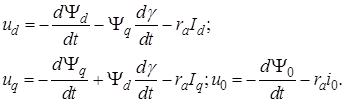
Уравнение (2.14) имеет решение при любом g, если каждое из выражений, заключенное в скобки, тождественно равно нулю. В этом случае (2.14) распадается на три уравнения
|

Уравнения для обмотки возбуждения и демпферных контуров сохраняются такими же, как в (2.7), поэтому они здесь повторно не приведены.
Непрерывно изменяющийся угол g выразим через скольжение ротора машины относительно синхронной оси, вращающейся с постоянной скоростью  . В этом случае
. В этом случае  и соответствующие составляющие эдс в (3.17), связанные с производной угла g, будут иметь следующий вид:
и соответствующие составляющие эдс в (3.17), связанные с производной угла g, будут иметь следующий вид:
Составляющие  в первых двух уравнениях системы (2.15) называются трансформаторными эдс, т. к. они вызываются изменением величин соответствующих потокосцеплений, а составляющие
в первых двух уравнениях системы (2.15) называются трансформаторными эдс, т. к. они вызываются изменением величин соответствующих потокосцеплений, а составляющие  и
и  называются эдс скольжения и вызваны отклонением частоты вращения ротора от синхронной.
называются эдс скольжения и вызваны отклонением частоты вращения ротора от синхронной.
Окончательно система уравнения СМ при отсутствии нулевых составляющих имеет вид:
|


В (2.16) напряжения ud, uq, токи id, iq, потокосцепления Yd, Yq называются соответственно продольными и поперечными напряжениями, токами, потокосцеплениями СМ, а их связь с фазными величинами определяется выражениями (1.4). Обобщенные векторы определяются по теореме Пифагора. Например, для напряжения:  .
.
В установившемся режиме работы СМ трансформаторные эдс  и эдс скольжения
и эдс скольжения  и
и  равны нулю, токи в демпферных обмотках также равны нулю и система уравнений (2.16) будет иметь вид:
равны нулю, токи в демпферных обмотках также равны нулю и система уравнений (2.16) будет иметь вид:
|