 2020-07-12
2020-07-12 127
127В противном случае, когда появление ошибки управления значительно снижает эффективность технологического процесса, для построения системы управления АЭП используют принцип замкнутого управления. Называют такую систему замкнутой.
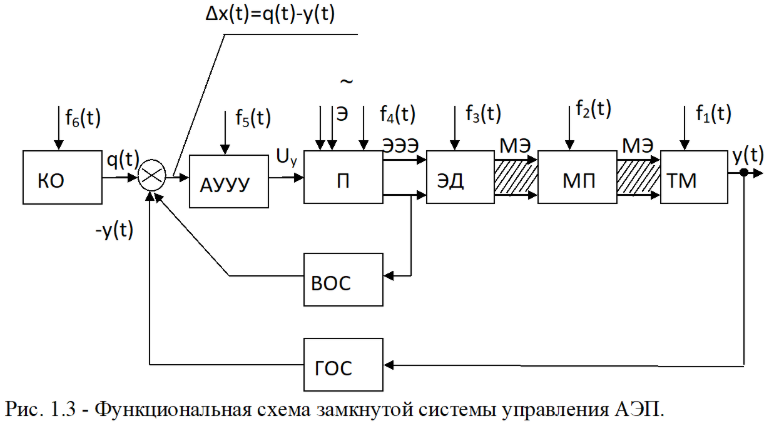
В ней используются два канала информации: к информации о требуемом значении регулируемой величины q(t) добавляется информация о действительном значении регулируемой величины y(t). Функциональная схема такой системы управления приведена на рис.1.3.
Информация о действительном значении регулируемой величины y(t) подаётся в узел суммирования с помощью главной обратной связи (ГОС). Говорят, что ГОС «замыкает» систему управления, соединяя её выход с входом.
Стрелка, обозначающая y(t), направлена в затемнённый сектор узла суммирования, т.е. сигнал ГОС поступает в узел суммирования со знаком «–» и поэтому ГОС называется отрицательной обратной связью.
 ∆x – рассогласование (ошибка управления);
∆x – рассогласование (ошибка управления);
ВОС – вспомогательная обратная связь;
ГОС – главная обратная связь;
В узле суммирования в результате алгебраического (с учётом знака) сложения сигналов q(t) и y(t) осуществляется определение величины и знака ошибки управления Δx(t)= +q(t) – y(t). Сигнал ошибки поступает на вход АУУ. Благодаря этому АУУ, формируя сигнал управления преобразователем П на основании информации о реально существующем соотношении заданного и действительного значения регулируемой величины обеспечивает подачу к ЭД такого количества ЭЭ, а к технологической машине МЭ, что ошибка управления может быть уменьшена до допустимой величины или сведена к нулю.
Кроме ГОС, в системе управления могут быть различные внутренние по отношению к ГОС обратные связи (ВОС). Они контролируют промежуточные параметры системы, что улучшает качество процесса управления. Систему, содержащую только ГОС, называют одноконтурной, а имеющую, кроме ГОС, ещё и ВОС – многоконтурной.
Сервоприводы.
Сервопривод — это привод с управлением через отрицательную обратную связь, позволяющую точно управлять параметрами движения. 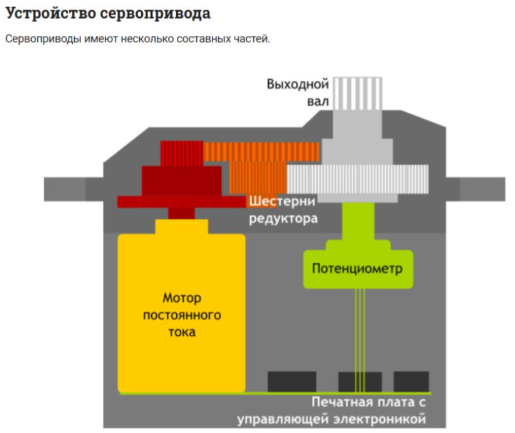
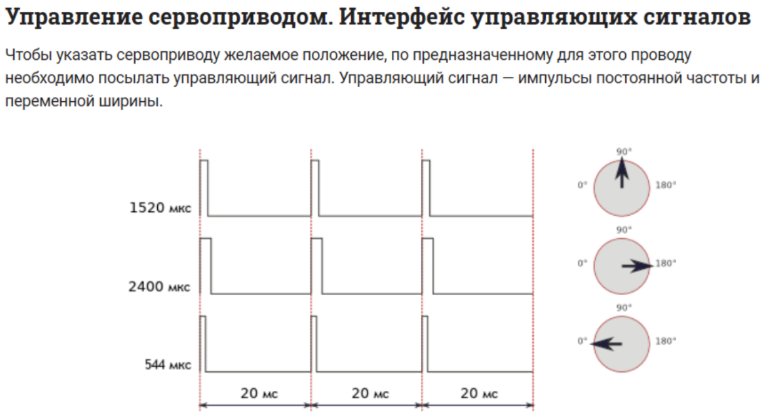 То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
То, какое положение должен занять сервопривод, зависит от длины импульсов. Когда сигнал поступает в управляющую схему, имеющийся в ней генератор импульсов производит свой импульс, длительность которого определяется через потенциометр. Другая часть схемы сравнивает длительность двух импульсов. Если длительность разная, включается электромотор. Направление вращения определяется тем, какой из импульсов короче. Если длины импульсов равны, электромотор останавливается.
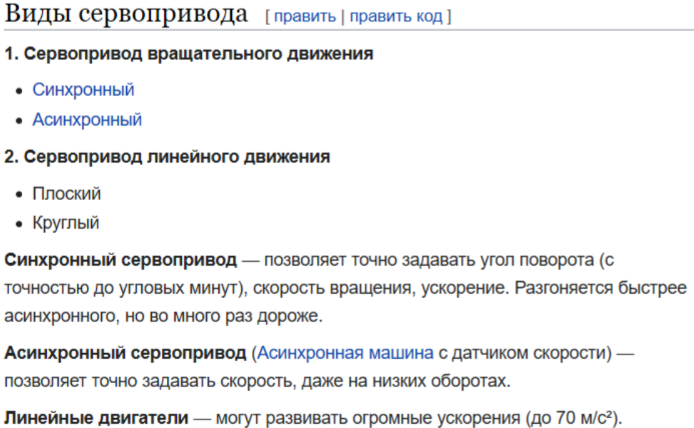
 Применение сервоприводов: в решении различных промышленных задач, в машиностроении и других отраслях.
Применение сервоприводов: в решении различных промышленных задач, в машиностроении и других отраслях.








