 2020-06-30
2020-06-30 92
92Пример 1. Задано: Тo = 0,5 с; ko = 1; kl = 1; переходный процесс вызван уменьшением l на 55 %.
Для выполнения задания переписываем дифференциальное уравнение
уравнение в конечных приращениях, учитывая, что m = 0,
 . (1)
. (1)
В нашем случае уравнение (1) примет вид
 .
.
Наиболее просто выполнить задание в среде Excel. Для этого занести в первый столбец значения Dj начиная с Dj0 до Dj10, во второй столбец –значения j начиная с j0 до j10. Подстрочный индекс обозначает момент времени. Так, j0 означает значение j в момент времени t0, j1 означает значение j в момент времени t1 = t0 + Dt, j2 означает значение j в момент времени t2 = t1 + Dt. В момент времени t0 наступает скачкообразное ступенчатое уменьшение l на 55 %.
Первая строка будет содержать значения Dj0 и j0, вторая строка –значения Dj1 и j1, третья строка – значения Dj2 и j2.
Так как в момент времени t0 = 0 отклонение отсутствовало, то j0 = 0. Рекомендуется первоначально принять Dt =0,1, но, если наблюдается слишком медленное затухание переходного процесса, необходимо увеличить Dt. Через заданное Dt (при t1 = t0 + Dt) Dj1 будет равно  . Тогда j1 будет равен j1 = j0 + Dj1.
. Тогда j1 будет равен j1 = j0 + Dj1.
Через заданное Dt (при t2 = t1 + Dt) Dj2 будет равно  . Соответственно j2 = j1 + Dj2.
. Соответственно j2 = j1 + Dj2.
Если при десяти значениях j не видно затухания процесса, необходимо увеличить количество номерных значений параметров (строк в среде Excel).
Результатом этой работы станет график изменения выходного параметра объекта регулирования в зависимости от времени (рис. 1). По графику (рис. 1) определяем, что неизменной величина j становится с момента времени, равного трем секундам.
Статической характеристикой системы регулирования будет зависимость  (рис. 2) [5, 6].
(рис. 2) [5, 6].

Рис. 1. Динамическая характеристика объекта регулирования
при заданном изменении возмущающего воздействия

Рис. 2. Статическая характеристика объекта регулирования
Пример 2. Задано: Тo = 5 с; ko = 1,1; kl = 1,1; переходный процесс вызван уменьшением m на 100 %.
Для выполнения задания переписываем дифференциальное уравнение
уравнение в конечных приращениях, учитывая, что l = 0,
 . (2)
. (2)
В нашем случае уравнение (2) примет вид
 .
.
Действуя аналогично примеру 1.1, выбираем Dt и пошагово рассчитываем значения j. В момент времени t0 наступает скачкообразное ступенчатое уменьшение m на 100 %. Далее появляется отклонение регулируемого параметра Dj. Считаем, что до момента t0 никаких отклонений не было, j0 = 0 и Dj0 = 0. В момент времени t0 происходитступенчатое изменение m = –1 (уменьшение на 100 %). Далее, через время Dt появляется Dj1, которое рассчитываю по формуле (2)  . Затем через время Dt появляется Dj2, которое рассчитывают по формуле (2)
. Затем через время Dt появляется Dj2, которое рассчитывают по формуле (2)  . После пошагового расчёта строим график (рис. 3).
. После пошагового расчёта строим график (рис. 3).
Примечание. Можно использовать любые виды программ для расчёта. Если вы не владеете программами расчёта на компьютере, возможен расчёт вручную на микрокалькуляторе.
По графику (рис. 3) определяем, что неизменной величина j становится с момента времени, равного тридцати пятя секундам.
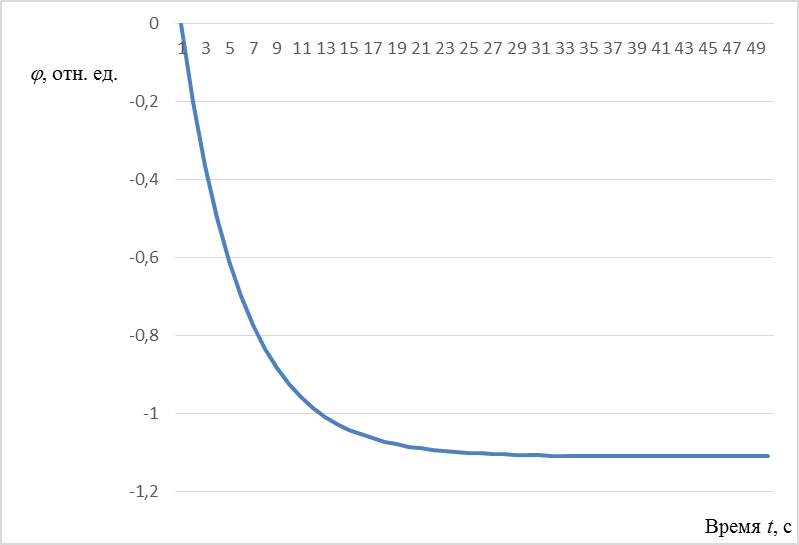
Рис. 3. Динамическая характеристика объекта регулирования
при заданном изменении регулирующего воздействия

Рис. 4. Статическая характеристика объекта регулирования








