 2020-06-30
2020-06-30 110
110Пример 1. Задано: уравнение объекта регулирования без самовыравнивания  инерционный П-регулятор; переходный процесс вызван уменьшением l на 100 %.
инерционный П-регулятор; переходный процесс вызван уменьшением l на 100 %.
Уравнение регулятора ищем в следующем виде
 .
.
Преобразуем дифференциальные уравнения в операторную форму и получаем:
уравнение объекта регулирования  ,
,
уравнение регулятора  .
.
Находим характеристическое уравнение системы автоматического регулирования
 .
.
Находим корни этого уравнения p1 = -2,45; p2 = -7,35.
Так как корни отрицательные, то переходный процесс будет затухающий, устойчивый.
Для выполнения задания переписываем дифференциальное уравнение в конечных приращениях:
уравнение объекта регулирования  ;
;
уравнение регулятора  .
.
Задаем начальные условия – j0 = 0; m0 = 0.
В момент времени t0 = 0 l уменьшился на 100 % (на 1 в относительном значении). Составим уравнение для Dj1.
 .
.
Подставляем значения j0 = 0; m0 = 0; l = 1; Dt задаем значение 0,1 с.
Рассчитываем  .
.
Составим уравнение для Dm1
 .
.
Находим m1.
 .
.
Составим уравнение для Dj2.
 .
.
Рассчитываем  .
.
Составим уравнение для Dm2.
 .
.
Находим m2.
 .
.
И далее повторяем эти уравнения такое количество раз, которое позволит заметить, что переходный процесс затухает.
Результатом работы должен стать график функции j = f(t).
На рисунке 6 построен график переходного процесса для нашего случая.

Рис. 6. Динамическая характеристика системы регулирования, состоящая из
неустойчивого объекта и регулятора с рекомендуемым законом регулирования
при заданном изменении возмущающего воздействия
Пример 2. Задано: уравнение объекта регулирования без самовыравнивания  ; ПИ-регулятор; переходный процесс вызван увеличением l на 20 %.
; ПИ-регулятор; переходный процесс вызван увеличением l на 20 %.
Уравнение регулятора имеет вид
 ,
,
где kр – коэффициент усиления регулятора;
Ти – время интегрирования регулятора.
Принимаем kр = 1; Ти = 1.
Преобразуем дифференциальные уравнения в операторную форму и получаем:
уравнение объекта регулирования ,
уравнение регулятора  .
.
Находим характеристическое уравнение системы автоматического регулирования
 .
.
Находим корни этого уравнения
p1,2 = -0,2 ± 0,46 i,
где i – мнимая единица.
Так как вещественные части корней отрицательные, то переходный процесс будет затухающий, устойчивый.
Для выполнения задания переписываем дифференциальное уравнение
в конечных приращениях.
Уравнение объекта регулирования
,
уравнение регулятора
 .
.
Задаем начальные условия – j0 = 0; m0 = 0.
В момент времени t0 = 0 l увеличилась на 20 % (на 0,2 в относительном значении). Составим уравнение для Dj1.
.
Подставляем значения j0 = 0; m0 = 0; l = 0,2; Dt задаем значение 0,5 с.
Рассчитываем .
Составим уравнение для Dm1.
 .
.
Находим m1.
.
Составим уравнение для Dj2.
.
Рассчитываем .
Составим уравнение для Dm2.
 .
.
Находим m2.
.
И далее повторяем эти уравнения такое количество раз, которое позволит заметить, что переходный процесс затухает.
Результатом работы должен стать график функции j = f(t).
На рисунке 7 построен график переходного процесса для нашего случая.
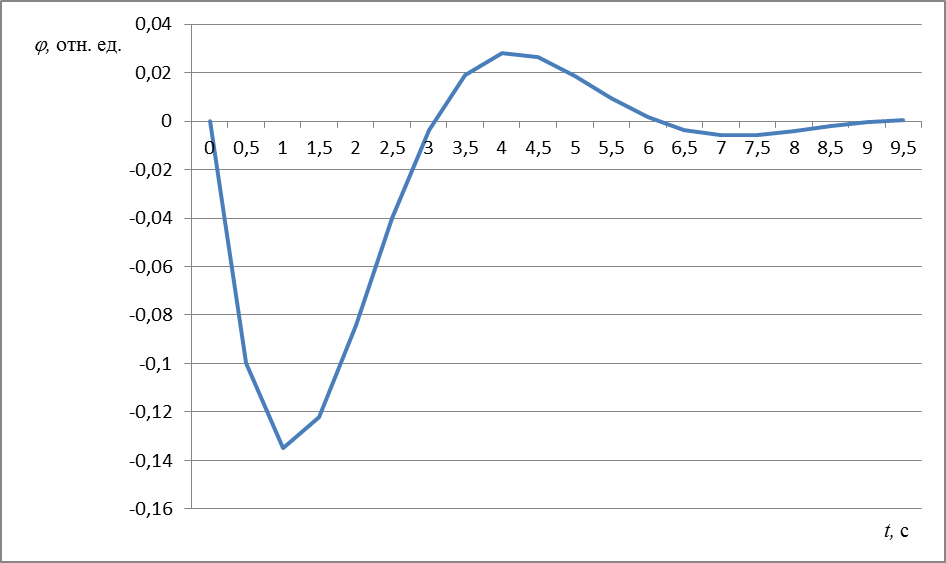
Рис. 7. Динамическая характеристика системы регулирования, состоящего
из неустойчивого объекта и регулятора с рекомендуемым законом регулирования
при заданном изменении возмущающего воздействия








