 2020-06-30
2020-06-30 160
160Заданного неустойчивого звена первого порядка
Задание
Построить, используя методы приближенного вычисления, динамическую характеристику неустойчивого объекта регулирования первого порядка (не имеющего самовыравнивания) по известному уравнению при следующих условиях: заданы постоянная времени объекта регулирования Тo, коэффициенты усиления по регулирующему ko и возмущающему kl воздействиям [2].
Уравнение объекта регулирования
 ,
,
где j – относительное отклонение выходного параметра объекта регулирования;
m – относительное отклонение регулирующего органа;
l – относительное отклонение возмущающего воздействия (нагрузки).
Исходные данные для расчёта по вариантам приведены в табл. 2.
Таблица 2
| Исходные данные | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Тo, с | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| ko, отн. ед. | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| kl, отн. ед. | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |
| Переходный процесс вызван | увеличением l на 50 % | увеличением m на 50 % | уменьшением l на 50 % | уменьшением m на 50 % | увеличением l на 100 % | увеличением m на 100 % | уменьшением l на 20 % | уменьшением m на 20 % | увеличением l на 10 % | увеличением m на 10 % |
Примеры выполнения задания
Пример 1. Задано: Тo = 5 с; ko = 5; kl = 5; переходный процесс вызван уменьшением l на 100%.
Для выполнения задания переписываем дифференциальное уравнение
уравнение в конечных приращениях, учитывая, что m = 0,
 . (3)
. (3)
В нашем случае уравнение (3) будет иметь вид  .
.
На рисунке 5 получаем искомую кривую переходного процесса неустойчивого звена (без самовыравнивания).
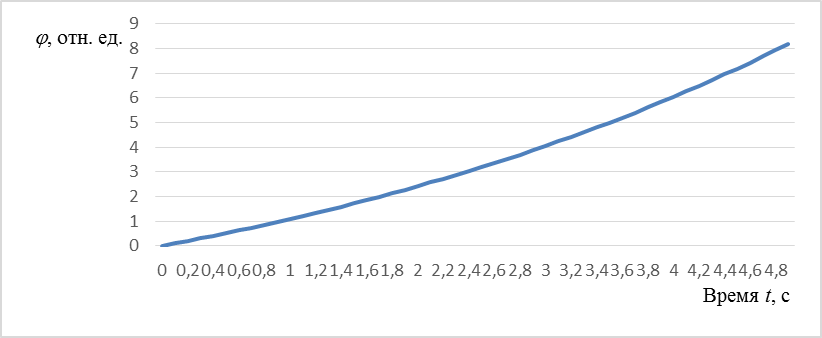
Рис. 5. Динамическая характеристика неустойчивого объекта регулирования
при заданном изменении возмущающего воздействия
Время переходного процесса (рис. 3) равно бесконечности, поэтому динамическое звено этого процесса является неустойчивым.
Выбор коэффициентов регулятора в системе
Регулирования с неустойчивым объектом
Первого порядка
Задание
Выбрать коэффициенты регулятора с заданным законом регулирования, который работает в паре с неустойчивым объектом, таким образом, чтобы система регулирования имела устойчивый сходящийся вид переходного процесса.
Построить, используя методы приближенного вычисления, динамическую характеристику полученной системы регулирования при следующих условиях: уравнение объекта регулирования взять из задания в разделе 1.2., а коэффициенты регулятора подобрать самостоятельно, используя критерии устойчивости [1; 2].
Исходные данные для расчёта по вариантам приведены в табл. 3.
Таблица 3
| Исходные данные | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 0 | |
| Выбрать регулятор с законом | ПД | ПД | ПД | ПИ | ПИ | ПИ | П | П | инерционный П | инерционный П |
| Переходный процесс вызван | увеличением l на 50 % | увеличением l на 30 % | уменьшением l на 10 % | уменьшением l на 40 % | увеличением l на 20 % | увеличением l на 60 % | уменьшением l на 80 % | уменьшением l на 90 % | увеличением l на 10 % | увеличением l на 10 % |
Примечания:
ПД – пропорционально-дифференциальный закон регулирования;
ПИ – пропорционально-интегральный закон регулирования;
И – интегральный закон регулирования;
П – пропорциональный закон регулирования;
инерционный П – пропорциональный закон регулирования, где регулятор представляет собой апериодическое звено первого порядка (процесс измерения регулируемой величины происходит с инерцией).








