 2020-06-30
2020-06-30 124
124Задано: Т1 = 1 с2; Т2 = 5 с; ko = 3; kl = 3; переходный процесс вызван уменьшением l на 100 %.
Для выполнения задания необходимо разбить уравнение второго порядка на два простых первого порядка [1; 3].
В нашем случае
 .
.
Производим замену дифференциального уравнения объекта регулирования второго порядка суммой двух дифференциальных уравнений первого порядка.
Уравнение  идентично сумме двух уравнений
идентично сумме двух уравнений  и
и  .
.
Переписываем дифференциальные уравнения в уравнения в конечных приращениях точно также, как в примерах выполнения заданий 1, 2, 3.
На рисунках 8, 9 получаем искомые кривые переходных процессов, соответствующих двум полученным уравнениям первого порядка.
На рисунке 10 получаем кривую переходного процесса второго порядка, ордината которой равна сумме ординат кривых переходных процессов первого порядка.
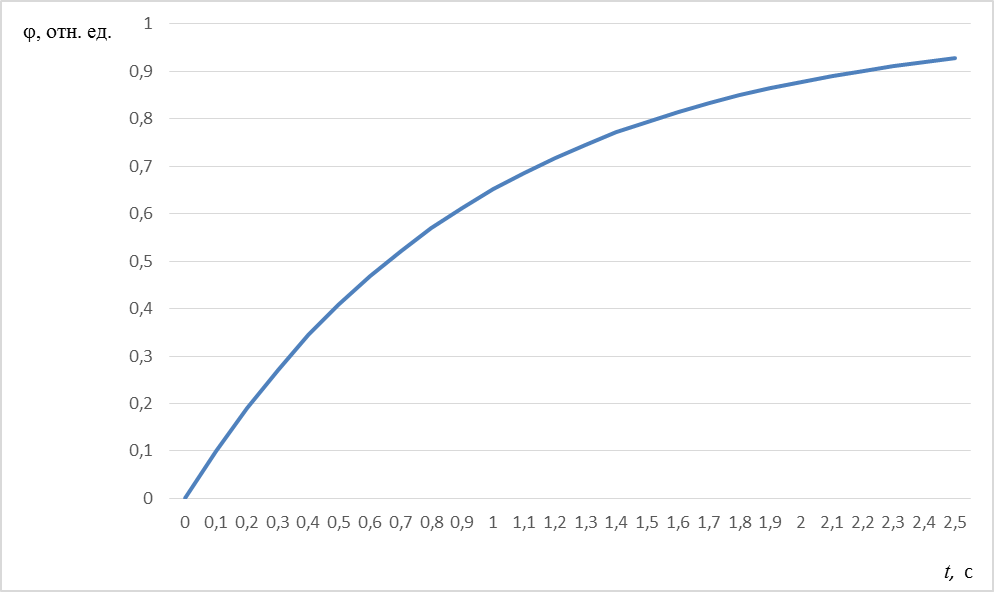
Рис. 8. Динамическая характеристика объекта регулирования первого порядка
при заданном изменении возмущающего воздействия
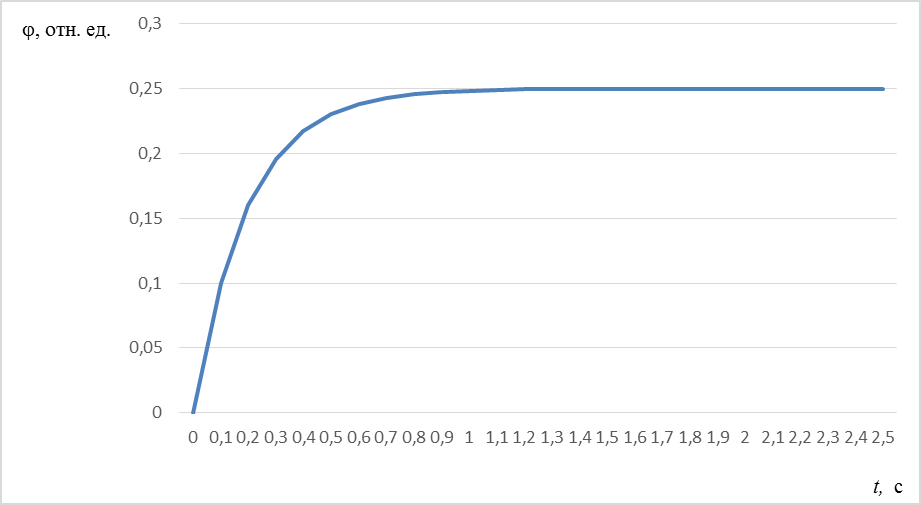
Рис. 9. Динамическая характеристика объекта регулирования первого порядка
 при заданном изменении возмущающего воздействия
при заданном изменении возмущающего воздействия
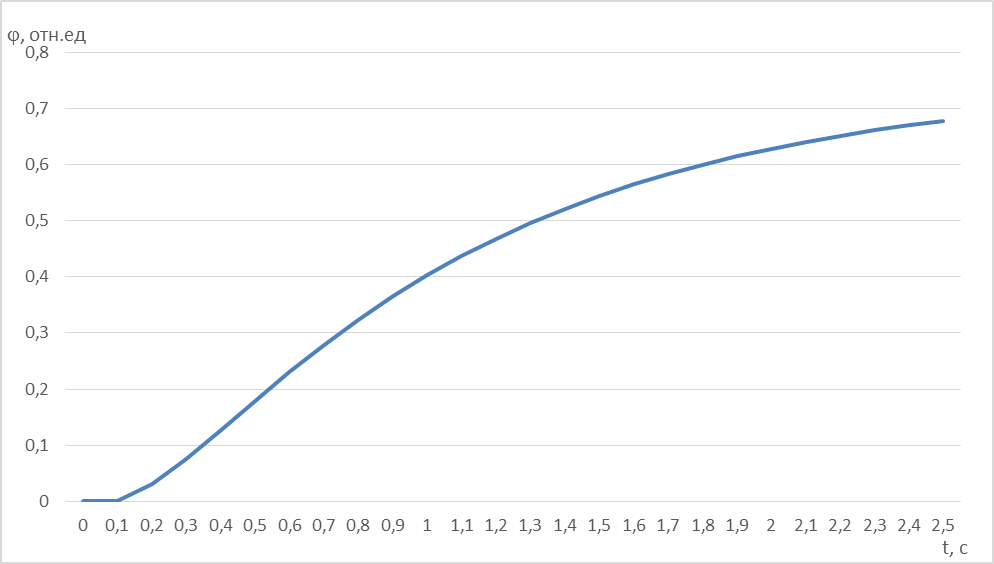
Рис. 10. Динамическая характеристика объекта регулирования второго порядка
при заданном изменении возмущающего воздействия
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Определение динамической характеристики
При изменении нагрузки
Задание
Построить, используя методы приближенного вычисления, динамическую характеристику системы автоматического регулирования (САР) по известным уравнениям составляющих систему звеньев и структурной схеме САР (рис. 11).
При выполнении задания следует воспользоваться уравнениями:
- чувствительного элемента xВЫХ=kЧЭxВХ;
- усилительного элемента xВЫХ=kУxВХ;
- сервомотора ТСМ(dxВЫХ/dt)=xВХ;
- объекта регулирования совместно с усилителем нагрузки
ТОР(dxВЫХ/dt)+ xВЫХ=kОРxВХ - k ll;
- гибкой обратной связи (ГОС) Т1 dxВЫХ/dt +xВЫХ=ТИ dxВХ/dt;
Обратите внимание на условные обозначения, использованные в уравнениях:
ЧЭ – чувствительный элемент;
УЭ – усилительный элемент;
СМ – сервомотор;
ОР – объект регулирования;
ГОС – гибкая обратная связь;
l – относительное отклонение возмущающего воздействия (относительное отклонение нагрузки).
Числовые значения коэффициентов дифференциальных уравнений для расчёта приведены в табл. 5.
Таблица 5
Коэффициенты дифференциальных уравнений
| № варианта
| Численные значения коэффициентов дифференциальных уравнений | ||||||||
| Т1 | ТИ | ТСМ | ТОР | kОР | kl | kУ | kЧЭ | Переходный процесс вызван | |
| 1 | 1 | 0,6 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 20 % |
| 2 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | уменьшением нагрузки на 20 % |
| 3 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 20 % |
| 4 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | уменьшением нагрузки на 20 % |
| 5 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 10 % |
| 6 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | уменьшением нагрузки на 10 % |
| 7 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | уменьшением нагрузки на 10 % |
| 8 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 10 % |
| 9 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 100 % |
| 10 | 1 | 0,5 | 1 | 2 | 1 | 1 | 1 | 1 | увеличением нагрузки на 100 % |
| УЭ |
| ОР |
| l |
| х0 |
| х6 |
| СМ |
| ЧЭ |
| ГОС |
| х1 |
| х2 |
| х3 |
| х4 |
| х5 |
| х7 |
Рис. 11. Структурная схема системы автоматического регулирования








