 2020-07-12
2020-07-12 119
1192.1 Широтно-импульсное регулирование.
Широтно-импульсное регулирование является одним из распространённых методов импульсного регулирования выходного напряжения, а, следовательно, и мощности выделяемой на нагрузке. При широтно-импульсном регулировании для изменения тока и напряжения нагрузки изменяют длительность замкнутого состояния ключа при постоянном периоде повторения. При этом регулируется относительное время проводимости ключа за период, что приводит к плавному изменению среднего значения напряжения на нагрузке. Выходное напряжение идеального преобразователя представляет собой последовательность прямоугольных импульсов с постоянной амплитудой и изменяющейся скважностью.
Скважность – это отношение одного периода, к времени действия (длительности) импульса в нем. В англоязычной литературе часто встречается понятие коэффициент заполнения, который обратно пропорционален скважности. Формула скважности:

где Т – длительность периода, с;
τ – время длительности импульса, с;
D – коэффициент заполнения.
На рисунке 2.1 изображены импульсы, которые возникают с определенной периодичностью. Длительность импульса равна ¼ периода Т, это означает, что коэффициент заполнения равен 25%, а скважность – 4. Специфическое название имеется у набора импульсов c коэффициентом заполнения – 50%, такой сигнал называется меандр.
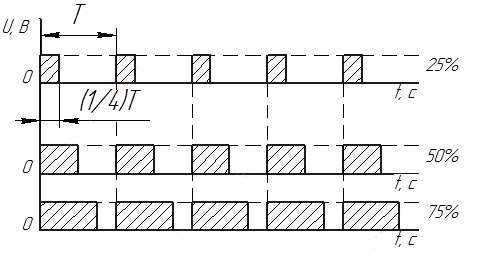
Рис. 2.1. Периодические сигналы с одинаковым периодом, но разной длительностью импульса.
Широтно-импульсные преобразователи находят все более широкое применение для регулирования и стабилизации различного рода нагрузок (на электротранспорте, в приводе металлообрабатывающих станков, для питания бортовых систем и т. д.), что объясняется рядом их преимуществ. Перечислим основные из них:
1) высокий КПД, так как потери мощности на регулирующем элементе преобразователя незначительны по сравнению с потерями мощности в случае непрерывного регулирования;
2) слабая чувствительность к изменениям температуры окружающей среды, поскольку регулирующим фактором является время проводимости ключа, а не величина внутреннего сопротивления регулирующего элемента, что имеет место при непрерывном регулировании;
3) высокое быстродействие, что особо важно для автоматизированного электропривода;
4) возможность получения значительных пусковых моментов электрических двигателей;
5) высокая точность управления при сохранении устойчивости;
6) гибкость регулирования выходного напряжения в широком диапазоне.
Однако широтно-импульсным преобразователям присущи и некоторые недостатки:
1) импульсный режим работы регулирующего элемента обусловливает значительные пульсации выходного напряжения, что приводит к необходимости устанавливать громоздкие фильтры;
2) наличие громоздких фильтров вызывает инерционность процесса регулирования в замкнутых системах;
3) импульсные преобразователи неустойчиво работают на импульсную нагрузку;
4) высокие скорости включения и выключения тока в силовой цепи ШИП приводят к возникновению радиопомех.
Несмотря на указанные недостатки, применение импульсных преобразователей весьма перспективно в тех случаях, когда на первое место выдвигаются требования высокой экономичности, надежности, малых габаритов, малой чувствительности к колебаниям температуры, высокой гибкости и точности регулирования.
2.2 Разработка алгоритма на языке Verilog.
Реализация широтно-импульсного регулирования в цифровой форме осуществляется с помощью двоичного счетчика, линейно увеличивающий двоичный код на выходе и сравнивающего компаратора. Компаратор сравнивает код приходящий с двоичного счетчика с кодом задающую длительность импульса. Если код с двоичного счетчика меньше кода, задающего длительность, то компаратор формирует на своем выходе логическую единицу. Если код с двоичного счетчика больше кода, задающего длительность, то компаратор формирует на своем выходе логический ноль.
Реализуем пример который позволяет регулировать яркость свечения светодиода с помощью ШИР.
module LAB (CLK, EN, LED);
input wire CLK;
output reg EN=1;
output reg LED;
reg [7:0]i=0;
reg [7:0]pwm=50;
always@(posedge CLK)
begin
i=i+1;
if(i<pwm)LED=1;
else LED=0;
end
endmodule
При этом величина периода генерируемых импульсов не меняется, а величину длительности импульса можно регулировать, изменяя величину переменной pwm. Чем больше переменная pwm тем больше длительность импульса. Стоит отметить, что в данном проекте двоичный счетчик 8 битный, то есть он производит линейный счет от 0 до 255 и снова сбрасывается в ноль. При этом регулирование длительности импульса оказывается ступенчатое и состоит из 255 дискрет. Соответственно максимальное значение переменной pwm не может быть больше 255.
Задание к работе.
Создайте алгоритм, реализующий плавное зажигание и плавное погашение светодиода на лабораторном стенде на основе ШИР. Время увеличения и уменьшения яркости свечения светодиода следует выбрать произвольным.
Содержание отчета
4.1 Цель работы.
4.2 Алгоритм модуля на языке Verilog для реализации ШИР плавного изменения яркости светодиода
4.3 Описание работы алгоритма.
4.4 Осциллограммы, поясняющие принцип ШИР.
4.5 Выводы
Контрольные вопросы
5.1 Дайте определение процедурного блока always.
5.2 Принципы ШИР.
5.3 Назовите основные достоинства и недостатки импульсного регулирования.
5.4 Какой период изменения яркости светодиода получился в вашем проекте?
5.5 На сколько дискрет разбито регулирование длительности?
5.6 Из каких соображений выбирается разрядность двоичного счетчика?








