 2020-08-05
2020-08-05 145
145РОЗДІЛ 1. ДИНАМIКА МАТЕРIАЛЬНОЇ ТОЧКИ
Предмет динамiки. Маса
Динамiка - це роздiл теоретичної механiки, в якому вивчаються закони механiчного руху тiл пiд дiєю прикладених до них сил.
Основнi закони динамiки були сформульованi I. Ньютоном в безсмертнiй працi ”Математичнi начала натуральної філософії” (1687 р.).
Маса - фiзична характеристика матерiальних об’єктiв, яка є мiрою їх iнерцiйних i гравiтацiйних властивостей. Виразником iнерцiйних властивостей тiла маса виступає в законах динаміки; виразником гравiтацiйних властивостей маса входить в закон тяжiння.
За І. Ньютоном маса тiл вимiрюється порiвнянням їх ваги на терезах з коромислом.
У одного тiла маса гравiтацiйна та маса iнерцiйна збiгаються.
Тiло з масою m має енергiю Е = mс 2 (тут с = 3·108 м/с - швидкiсть свiтла в вакуумi).
Закони Ньютона
Перший закон Ньютона - закон інерції: будь-яке тiло продовжує зберiгати свiй стан спокою або рiвномiрного прямолiнiйного руху, поки i оскiльки його не спонукають змiнити цей стан прикладенi сили. Тут під термiном ”будь-яке тiло” треба розумiти матерiальну точку.
Перший закон стверджує динамiчну рiвноправнiсть стану спокою i рiвномiрного прямолiнiйного руху. Два стани - спокою i рiвномiрного прямолiнiйного руху - Ньютон розглядає як природнi стани всякого тiла. Здатнiсть тiл перебувати в цих природних станах i є те, що називається iнерцiєю тiл.
Закон iнерцiї справедливий тiльки вiдносно цiлком певної системи вiдлiку – ”iнерцiальної” системи. При розглядi бiльшостi технiчних задач iнерцiальною можна вважати систему, незмiнно пов’язану із Землею.
Другий закон - закон дiї сил: змiна кiлькостi руху матерiальної точки пропорцiональна прикладенiй рушiйнiй силi i вiдбувається в напрямi тiєї прямої, по якiй ця сила дiє
 , (2.1)
, (2.1)
де m - маса матерiальної точки  ,
,  - її швидкiсть,
- її швидкiсть,  - сила, яку прикладено до точки, k - коефiцiєнт пропорцiональностi.
- сила, яку прикладено до точки, k - коефiцiєнт пропорцiональностi.
В усiх системах одиниць вибiр одиниць вимiрювання сили i маси узгоджено в такий спосiб, що коефiцiєнт пропорціональності k дорiвнює безрозмiрнiй одиницi.
При m = const i d /dt =  ( - прискорення матерiальної точки) маємо
( - прискорення матерiальної точки) маємо
m  = . (2.2)
= . (2.2)
Рiвнiсть (2.2) читається так: у кожний момент часу добуток маси матерiальної точки та її прискорення дорiвнює рушiйнiй силi, а напрям вектора прискорення збiгається з напрямом сили.
Рiвнiсть (2.2), яка виражає другий закон Ньютона, справедлива лише за умови, що рух матерiальної точки вiднесено до iнерцiальної системи вiдлiку.
Третiй закон - закон взаємодiї тіл: дiї завжди вiдповiдає рiвна їй i протилежно направлена протидiя; iнакше кажучи, - сили взаємодiї двох матерiальних точок завжди мiж собою рiвнi i направленi в протилежнi сторони.
Третiй закон Ньютона стверджує, що в природi iснує тiльки взаємодiя тiл, причому дiя i протидiя за величиною рiвнi, а за напрямком протилежнi. Це справедливо і у випадку спокою, і у випадку руху тiл. Наприклад, Земля i камiнь, що падає на неї, є цiлком рiвноправними тiлами: сила притягання каменя до Землi дорiвнює силi притягання Землi до каменя. З цього i з рiвняння (2.2) випливає, що прискорення взаємодiючих тiл - Землi i каменя - обернено пропорцiональне їх масам.
Четвертий закон - закон незалежностi дiї сил: якщо на матерiальну точку дiють кiлька сил одночасно, то вони надають точцi такого складного руху, який складається кiнематично з рухiв, що їх кожна сила окремо здатна надати точцi без початкової швидкостi; якщо ж точка вже має швидкiсть i на неї дiє ще й сила, то рух точки складається кiнематично з руху за iнерцiєю i руху вiд дiї сили.
Математичний змiст принципу незалежностi дiї сил такий: при одночаснiй дiї на матерiальну точку сил  i
i  прискорення точки дорiвнюватиме геометричнiй сумi тих прискорень, якi були б при роздiльнiй дiї сил:
прискорення точки дорiвнюватиме геометричнiй сумi тих прискорень, якi були б при роздiльнiй дiї сил:
 . (2.3)
. (2.3)
Вiдомо, що геометрична сума прикладених до точки сил називається рiвнодiйною:
 = + .
= + .
Тоді
m = .
Якщо на точку дiють одночасно декiлька сил, то другий закон Ньютона записують у виглядi:
 . (2.4)
. (2.4)
Три форми диференцiальних рiвнянь
Векторна форма
Запишемо другий закон Ньютона так:
 , (3.1)
, (3.1)
де m – маса точки, d 2  /dt 2 = – її прискорення, – рiвнодiйна сил, прикладених до точки.
/dt 2 = – її прискорення, – рiвнодiйна сил, прикладених до точки.
Рiвнiсть (3.1) називається основним диференцiальним рiвнянням руху матерiальної точки у векторнiй формi.
Координатна форма
Проектуємо рiвняння (3.1) на осi прямокутної декартової системи координат Oxyz:
 (3.2)
(3.2)
де Fx, Fy, Fz - проекцiї сили на декартовi осi координат.
Рiвняння руху в цилiндричних координатах:
 (3.3)
(3.3)
де Fr, Fφ, Fz - проекцiї рiвнодiйної прикладених до точки сил на вiсi r, φ, z (рис. 3.1).
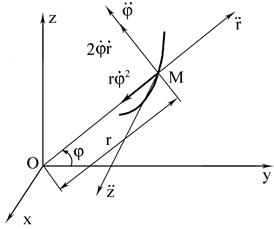
Рис. 3.1
Натуральна форма
Розкладаючи вектор прискорення на два компоненти по взаємно перпендикулярних напрямах дотичної i головної нормалi, одержимо:
 (3.4)
(3.4)
В такому разi рiвняння руху в натуральнiй формi будуть мати вигляд:
 (3.5)
(3.5)
де Fτ i Fn – проекцiї на додатно зорiєнтованi дотичну i головну нормаль рiвнодiйної сил, що дiють на точку (рис. 3.2).
Сила i прискорення точки завжди лежать у стичнiй площинi, орiєнтацiя якої в просторi визначається одиничними векторами  i
i  . Проекцiя сили на бiнормаль
. Проекцiя сили на бiнормаль  дорiвнює нулю.
дорiвнює нулю.
|
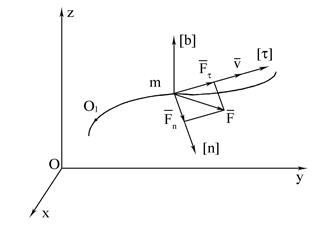
Рис. 3.2
§ 4. Двi основнi задачi динамiки точки. План їх розв’язання
У динамiцi матерiальної точки можна ставити i розв’язувати задачi двох основних типiв.
Перша основна задача.
Вiдомий закон руху матерiальної точки
r = r (t), (4.1)
треба визначити рiвнодiйну сил, якi зумовили рух точки. Маса точки задається.
Спосiб розв’язування задачi: диференцiюємо двiчi рiвняння (4.1) i знаходимо прискорення (вiрнiше, його проекцiї). За диференцiальним рiвнянням руху знаходимо силу або її проекцiї.
Друга основна задача (обернена).
Заданими є сила F = F (t, r, v) i ”початковi умови”: в певний (початковий) момент часу t 0 заданi радiус-вектор  i швидкiсть v 0 точки. Вiдома також маса точки. Треба знайти закон руху r = =r (t) точки в просторi.
i швидкiсть v 0 точки. Вiдома також маса точки. Треба знайти закон руху r = =r (t) точки в просторi.
Щоб розв’язати цю задачу, треба скласти диференцiальнi рiвняння руху i проiнтегрувати їх.
Момент часу t 0 називається початковим; положення точки, яке визначається радiус-вектором , називається початковим положенням; швидкiсть точки в момент часу t 0 називається початковою швидкiстю v 0.
При розв’язуваннi задач динаміки матеріальної точки корисно додержуватись такого плану:
1) аналiз сил. Для цього треба:
а) видiлити дослiджуване тiло;
б) вказати усi навколишнi тiла, якi дiють на дослiджуване тiло;
в) визначити всi сили, що дiють на об’єкт дослiдження в русi вiдповiдно до тiл, перелiчених в пунктi б);
г) вказати залежнiсть сил вiд фiзичних параметрiв: часу, положення (координат), швидкостi i т. iн.;
2) показати на рисунку матерiальну точку (тiло) і прикладенi до неї заданi сили в довільний момент часу;
3) звiльнити точку вiд в’язей i показати сили реакцiй в’язей;
4) вибрати систему вiдлiку;
5) скласти диференцiальнi рiвняння руху матерiальної точки;
6) розв’язати складенi рiвняння руху;
7) проаналiзувати розв’язок.
Зауваження. Для закріплення матеріалу §§3-4 необхідно розв’язати задачі зі збірника “Мещерский И. В. Сборник задач по теоретической механике. – М. Наука, 1981 (1986)“:
1) № 26.1, 26.2, 26.5, 26.6, 26.8; 27.1, 27.2, 27.4, 27.30, 27.40, 27.47;
2) № 26.9, 26.10, 26.13, 26.14, 26.17-26.20, 26.24, 26.26; 27.7, 27.9, 27.16, 27.17, 27.22, 27.26, 27.32, 27.37, 27.49, 27.54, 27.58;
3) № 26.31-26.35; 27.36, 27.38, 27.60, 27.61, 27.64, 27.65.
Рекомендується розв’язати також задачі № 8.3, 8.4, 8.6, 8.7, 8.8, 8.13, 8.15, 8.16, 8.18 зі збірника “Сборник задач по теоретической механике /Под ред. К. С. Колесникова. – М., Наука, 1989”.








