 2014-02-04
2014-02-04 512
512Основные признаки классификации динамических моделей
Произв-ные объекты хар-ся тем, что протекающие в них пр-сы развиваются во времени и пространстве  входные и выходные сигналы сис-мы могут зависеть от времени, пространственных координат и дополнительных аргументов. В простейшем случае оператор сис-мы преобразует входной вектор
входные и выходные сигналы сис-мы могут зависеть от времени, пространственных координат и дополнительных аргументов. В простейшем случае оператор сис-мы преобразует входной вектор  в выходной вектор
в выходной вектор  :
:
→.
 , где А – оператор преобразования.
, где А – оператор преобразования.
В общем случае оператор преобразования сожжет так же зависеть от времени:  .
.
В более частых случаях в качестве аргументов для х, у, и А могут выступать так же пространственные координаты и дополнительные внешние и внутренние пар-ры. Если преобразования входных сигналов, т.е. св-ва и стр-ра оператора преобразования А не изменяется во времени, то динамическую сис-му наз-ют стационарной. В противном случае ее именуют нестационарной.
Реакция стационарной сис-мы на любой вид возмущения зависит только от интервала времени между моментом начала действия возмущения и моментом времени отсчета.
Реакция нестационарной сис-мы зависит как от текущего времени, так и от момента приложения входного сигнала, т.е. выходные сигналы не только сдвигаются во времени, но и изменяют свою форму. Если вместо времени аргументом выступает пространственная координата, то говорят о пространственных моделях.
Если одновременно выступает время и пространство, то говорят о пространственно-времен -ных моделях:
 - пространственная модель.
- пространственная модель.
 -пространственно-временная модель.
-пространственно-временная модель.
Динамические модели делятся на 2 класса:
1. Без инерционные, в которых оператор преобразования определяет зависимость значений выходных ф-ций в данный момент времени по значению входных ф-ций в тот же момент времени, т.е. это так называемые модели без памяти.
2. Инерционные, в которых значения выходных ф-ций в некоторый момент времени зависят не только от настоящих или текущих, но и от предшествующих значений входных ф-ций. Это так называемые модели с памятью.
В большинстве случаев динамические модели обладают св-вом конечности памяти, т.е. значение выходных ф-ций в данный момент времени зависят от значения выходных ф-ций не на всем предшествующем интервале времени, а лишь на некотором интервале фиксированной длины. В этом случае говорят о модели с конечной памятью.
Динамические модели так же разделяют на:
1. Детерминированные. 2. Стохастические (вероятностные).
В 1-ом случае однозначная связь между выходными и входными сигналами.
Во 2-ом случае опр-ся распределение вероятности значения выходных сигналов по известным входным сигналом.
Динамические модели м.б. параметрическими, когда операторы преобразования содержат неизвестные пар-ры. Так же динамические модели классифицируются по типу оператора преобразования:
1. Алгебраические.
2. Дифференциальные.
3. Конечно-разностные и т.д.
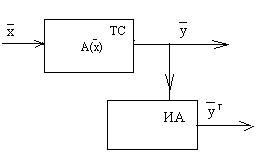
При идентификации динамических объектов следует так же понимать, что в рез-те измерения сигналов мы получаем не точные их значения, а некоторые отклики этих значений искаженных погрешностями измерительной аппаратуры и методикой измерения аппаратурой.
ТС – техническая сис-ма, ИА – измерительная аппаратура,  - вектор у с некоторыми погрешностями.
- вектор у с некоторыми погрешностями.

 .
.
При проведении идентификации динамических объектов так же проводится планирование эксперимента, которое отличается от планирования эксперимента для статических объектов значительно более широкими возможностями в отношении способов воздействия на точность оценки параметров. Управление экспериментом в данном случае может осуществляться не только путем выбора оптимальных факторов, т.е. управляющих величин, а так же моментом времени координат изменения начальных переменных краевых ф-ций, управляющих ф-ций.
Специфической проблемой динамического моделирования явл-ся составление плана самих измерений, т.к. пр-сы в исследуемом объекте в общем случае изменяется во времени и пространстве.аргументы, т.е. независимые переменные в ходе проведения эксперимента изменяются. задача состоит в выборе наилучшим образом моментов и координат точек измерения.








