2014-02-02
2014-02-02 1933
1933Датчики скорости и положения, применяющиеся в замкнутых схемах управления
Для получения информации о скорости и положении вала двигателя в замкнутых цифровых ЭП применяются аналоговые и дискретные датчики скорости и положения.
Датчики скорости (тахогенераторы). Эти датчики предназначены для измерения скорости вращения вала двигателя или исполнительного органа рабочей машины. Они представляют собой специализированные электрические машины небольшой мощности, выходное напряжение Uвых которых пропорционально скорости вращения якоря (ротора). По принципу своего действия и устройству тахогенераторы бывают постоянного и переменного тока.
Тахогенераторы постоянного тока представляют собой небольшие генераторы постоянного тока с возбуждением от независимого источника или от постоянного магнита.
Тахогенераторы переменного тока в большинстве случаев применяются асинхронного типа и по своему устройству мало отличаются от однофазных асинхронных двигателей. Они имеют две обмотки: одна из которых ОВ подключается к питающей сети и служит для возбуждения тахогенератора, а другая ОИ является измерительной. Напряжение на зажимах этой обмотки пропорционально скорости вращения тахогенератора.
Кроме рассмотренных выше аналоговых датчиков скорости в замкнутых схемах все шире применяются цифровые датчики, сигналы которых могут непосредственно поступать в цифровые схемы управления. Применение таких датчиков позволяет повысить точность регулирования скорости исполнительных органов рабочих машин и механизмов.
Первичными элементами цифровых датчиков скорости и положения, непосредственно устанавливаемых на валу двигателя или рабочей машины, являются индукционные или фотоэлектрические элементы.
Импульсный индукционный датчик скорости состоит из первичного элемента, зубчатого диска 1 (рис. 6), соединенного с валом двигателя или рабочей машины. Против зубцов этого диска располагается индуктор 2, представляющий собой постоянный магнит с расположенной на нем измерительной обмоткой 3, подключенной к источнику питания Uп.
 |
Рисунок 6 - Схема индукционного датчика скорости
Напряжение, снимаемое с обмотки, подается через конденсатор С на вход усилителя У, выполняющего одновременно роль формирователя импульсов. При вращении диска изменяется зазор между его зубцами и полюсами индуктора 2. Вследствие этого резко изменяется магнитное сопротивление воздушного зазора и величина магнитного потока, проходящего через зубцы диска 1 и индуктор. Изменяющийся магнитный поток индуцирует в обмотке 3 ЭДС, частота которой
f=ωN/(2π),
где N—число зубцов диска, ω—скорость диска (вала двигателя).
Созданное этой ЭДС напряжение переменного тока через конденсатор С подается на вход усилителя, который усиливает этот сигнал и формирует из него последовательность выходных прямоугольных импульсов, частота которых пропорциональна измеряемой скорости. Далее эти импульсы при помощи цифрового блока «частота—код», имеющегося, например, в УБСР-ДИ, преобразуются в двоичное число путем их подсчета за определенный интервал времени с запоминанием полученного числа на время последующего интервала. При необходимости этот переменный по частоте сигнал может быть преобразован и в напряжение постоянного тока (например, с помощью интегрирующего операционного усилителя) для использования в аналоговых схемах управления ЭП.
Датчики положения. Эти датчики применяются в замкнутых схемах управления ЭП и выполняются аналоговыми или цифровыми.
Цифровой фотоэлектрический датчик положения состоит из первичного элемента, представляющего собой кодирующий диск, соединяемый с валом двигателя или рабочей машины (рис.7). Он имеет несколько концентрических колец (дорожек), каждое из которых состоит из сегментообразных прозрачных и непрозрачных участков. Кольцо с наименьшим радиусом (т. е. расположенное ближе всего к оси диска) имеет два участка— прозрачный и непрозрачный, и относится к старшему разряду выходного числа. В каждом следующем от центра кольце число участков удваивается, что соответствует в двоичном представлении чисел переход к следующему разряду.
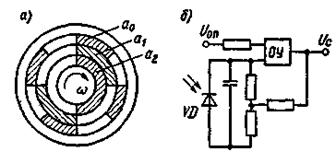
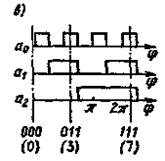
Рисунок 7 – Цифровой фотоэлектрический датчик
Получение электрического сигнала производится фотоэлектрическим способом. Для этого по одну сторону диска устанавливаются по числу колец источники света—светодиоды, а по другую сторону—приемники света—фотодиоды. Когда между ними находится прозрачный участок диска, светодиод освещает фотодиод, электрическое сопротивление последнего резко изменяется, что и является входным воздействием для последующей схемы датчика положения.
Кроме фотоэлектрических первичных элементов в датчиках положения используются индуктивные датчики с индуктосинами, позволяющие получать более высокие характеристики по точности.
В цифровых системах управления ЭП распространение получили импульсные датчики типов ПДФ-3 и ДИФ-5. Первый из них имеет выходной сигнал в виде двух серий импульсов, сдвинутых друг относительно друга на четверть периода. Число импульсов на оборот составляет 600. Датчик типа ДИФ-5 имеет различные модификации и позволяет получать за один оборот вала датчика от 45 до 1800 импульсов.
Микропроцессором (МП) называется программно-управляемое устройство, осуществляющее процесс обработки цифровой информации и управления им и построенное на одной или нескольких больших интегральных микросхемах (БИС). Остановимся более подробно на основных признаках МП, сформулированных в этом определении.
Микропроцессор выполняется на основе одной или нескольких БИС, каждая из которых состоит из нескольких десятков тысяч простых элементов — транзисторов, диодов, резисторов и конденсаторов. Площадь БИС не превосходит нескольких десятков квадратных миллиметров. Такое исполнение МП определяет его малое энергопотребление, надежность в работе, небольшие массу и габариты. При массовом выпуске стоимость БИС резко снижается.
Микропроцессор является элементом управления с гибким алгоритмом работы, который определяется закладываемой в его память программой и может быть изменен.