 2014-02-02
2014-02-02 3478
3478В нелинейных системах могут наблюдаться весьма характерные для них режимы движения, получившие название автоколебаний, которые представляют собой периодические движения с установившимися постоянными амплитудой и частотами.
Как правило, автоколебания являются нежелательным явлением, которого надо избегать. Иногда их искусственно создают для улучшения динамических свойств системы. В некоторых случаях автоколебательный режим является допустимым по условиям работы системы.
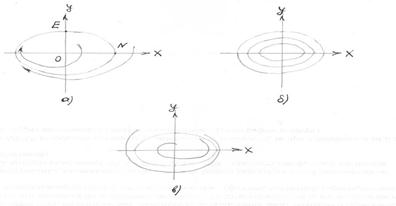
Рис.10.9. Различные предельные циклы
Существование автоколебаний означает наличие на фазовой плоскости замкнутых кривых, например, такой как на рис.10.9,а. В нелинейной системе может наблюдаться не только один, но и несколько автоколебательных режимов, которым на фазовой плоскости должно соответствовать несколько замкнутых кривых (рис.10.9,б). Замкнутые кривые называют также предельными циклами. Тот или иной предельный цикл обуславливается значением начальных условий. Предельные циклы могут быть устойчивыми и неустойчивыми. В первом случае (рис.10.9,а) фазовые траектории и изнутри и извне стремятся к предельному циклу, во втором (рис.10.9,в) они стремятся от предельного цикла. Неустойчивый предельный цикл означает неустойчивые автоколебания, которые физически неосуществимы. Устойчивые предельные циклы означают, что в системе при наличии соответствующих условий будут наблюдаться автоколебания. Переходные процессы в такой системе стремятся к установившимся гармоническим колебаниям.
По графику предельного цикла можно приблизительно определить значения амплитуды и частоты автоколебаний.
Частота» ОЕ/ОN, а амплитуда» ON с учетом масштабов по обеим осям (см. рис.10.9,а).








