 2014-02-02
2014-02-02 1063
1063Рис. 2.31.
Рис. 2.30.
Рис. 2.29.
Рис. 2.27.
 (64)
(64)
Исходя из этих правил, характеристические уравнения для  имеют вид:
имеют вид:
 (65)
(65)
Корни характеристического полинома, настроенные на минимум квадратичной интегральной ошибки, тоже в общем случае являются комплексными корнями с отрицательными действительными частями.
Переходные процессы, соответствующие данным характеристическим уравнениям представлены на рисунке:
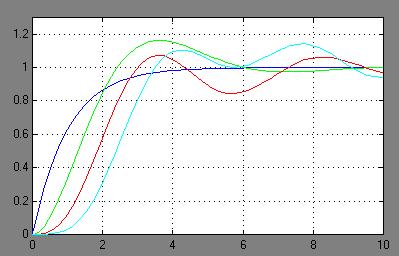
Рис. 2.28.
Такие системы, несмотря на минимум в целом квадратичной ошибки, являются более грубыми (σ%≈ 16%)
Пример:
Построить модальный регулятор для объекта (двигатель постоянного тока), обеспечивающим следующие показатели качества: σ %=0%, tпп=3с.:
 |
Параметры системы: 
Схема переменных состояния
 |
Описание в пространстве состояния:
Проверка системы на управляемость:
 система управляема
система управляема
Проверка системы на наблюдаемость:
 система наблюдаема
система наблюдаема
Наблюдаемость и управляемость являются необходимыми условиями для синтеза.
Схема переменных состояния с модальным регулятором
-

 Выбираем желаемый характеристический полином в стандартной биномиальной форме, что обеспечивает σ%=0%
Выбираем желаемый характеристический полином в стандартной биномиальной форме, что обеспечивает σ%=0%


Результаты моделирования САУ с модальным регулятором:
Рис. 2.32.
В последнее время в связи с широким применением средств вычислительной техники в промышленной автоматике псе большее применение получают дискретные системы управления.
Дискретные системы – это системы, в которых хотя бы в одном из звеньев непрерывному входному сигналу соответствует дискретный выходной сигнал. Преобразование непрерывного сигнала в дискретный называется квантованием, или дискретизацией. Звено, в котором происходит дискретизация сигнала, называется квантователем или дискретным элементом.
Различают следующие виды квантования:
1. по уровню;
2. по времени;
3. по уровню и времени.
Квантование по уровню заключается в фиксации вполне определенных дискретных значений непрерывного сигнала. При этом непрерывный сигнал заменяется ступенчато изменяющимся сигналом. Смежные дискретные значения отличаются друг от друга  , называемую шагом квантования. Переход от одного уровня квантования на другой происходит в моменты времени, когда непрерывный сигнал достигает очередного фиксированного значения.
, называемую шагом квантования. Переход от одного уровня квантования на другой происходит в моменты времени, когда непрерывный сигнал достигает очередного фиксированного значения.
Рис. 3.1.
Квантование по времени заключается в фиксации значений непрерывного сигнала в равноотстоящие друг от друга дискретные моменты времени. При этом квантованный сигнал представляет собой последовательность импульсов. Смежные моменты времени отличаются на постоянную величину  , называемую интервалом дискретности или шагом дискретности.
, называемую интервалом дискретности или шагом дискретности.
2)
Рис. 3.2.
При совместном квантовании по уровню и по времени фиксируются дискретные по уровню значения в дискретные моменты времени.
Рис. 3.3.
В зависимости от применяемого вида квантования все дискретные системы можно разделить на три класса:
· релейные – системы, в которых осуществляется квантование по уровню;
· импульсные - системы, в которых осуществляется квантование по времени;
· цифровые - системы, в которых осуществляется квантование и по уровню и по уровню.
Квантование по уровню в релейных системах осуществляется при помощи специальных элементов – квантователей. Простейшими квантователями являются двух- и трехпозиционные реле.
 |
Рис. 3.4.
 |
Рис. 3.5.
Квантование по времени осуществляется с помощью импульсного элемента. Импульсный элемент преобразует непрерывный входной сигнал в последовательность равноотстоящих друг от друга импульсов.

