 2014-02-02
2014-02-02 3962
3962| Рис. 5.3. Структурная схема САР с И-регулятором |
Структурная схема системы регулирования с интегральным регулятором (И-регулятором), осуществляющим интегральный закон регулирования, представлена на рис. 5.3 (см. рис. 1.3).
Регулятор представляет собой последовательное соединение основных элементов. Получим уравнение регулятора из передаточной функции, которая равна, как известно, произведению передаточных функций всех элементов, входящих в регулятор. Передаточная функция регулятора будет
 , (5.6)
, (5.6)
где W ИУ(р)= k ИУ – передаточная функция измерительного устройства; W ЭС(р)= 1 – передаточная функция элемента сравнения; W УУ(р)= k УУ – передаточная функция управляющего устройства; W ИМ(р) – передаточная функция исполнительного механизма.
Рассмотрим случай, когда используется исполнительный механизм с переменной скоростью. Тогда  и передаточная функция регулятора будет
и передаточная функция регулятора будет
 , (5.7)
, (5.7)
из которой имеем уравнение регулятора в операторном виде
 (5.8)
(5.8)
и дифференциальное уравнение регулятора
 . (5.9)
. (5.9)
Интегрирование уравнения (5.9) в отклонениях дает
 . (5.10)
. (5.10)
Из уравнения (5.10) следует, что перемещение регулирующего органа (Dmрег) пропорционально интегралу от величины отклонения параметра от заданного значения. Отсюда название закона регулирования. В литературе по автоматике это уравнение (закон регулирования) обычно записывают в виде
 , (5.11)
, (5.11)
где k р – коэффициент усиления регулятора; Т и – постоянная времени интегрирования (постоянная интегрирования). Величины k р и Т и являются параметрами настройки регулятора. Их можно изменять в широких пределах при настройке регулятора на конкретном объекте.
Передаточная функция И-регулятора
 . (5.12)
. (5.12)
Из уравнений (5.10) и (5.11) следует, что И-регулятор можно считать идеальным интегрирующим звеном.
Тогда кривая разгона регулятора с учетом того, что он представляет собой отрицательную обратную связь по отношению к объекту регулирования, будет иметь вид, представленный на рис.5.4.
Из уравнения (5.11) следует, что при Dj=const и t = Т и Dmрег= k рDj, это позволяет экспериментально определить Т и (рис. 5.4). Чем меньше время интегрирования Т и, тем быстрее перемещается регулирующий орган. При Т и®0 регулирующий орган будет быстро перемещаться из одного крайнего положения («закрыто») в другое («открыто») и основное время будет находиться в крайних положениях. Имеем случай так называемого позиционного регулирования (Пз- закон регулирования, как частный случай И-закона).
| Рис. 5.6. Кривая разгона И-регулятора |
Достоинства и недостатки И-закона регулирования можно увидеть на графике процесса регулирования (рис. 5.5), под которым понимают изменение регулируемого параметра j во времени при нанесении на объект регулирования внешнего возмущения l и работе регулятора.
| Рис. 5.7. Процесс регулирования с И-регулятором: j0 – заданное значение параметра; Dнеч – зона нечувствительности регулятора; t р – время регулирования; А 1 – максимальное отклонение регулируемого параметра. |
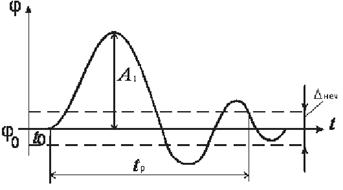
К достоинствам И-регулятора относится точность регулирования в статических (установившихся) режимах. Как видно из рис. 5.5, среднее значение регулируемого параметра после окончания работы регулятора равно заданному значению (отсутствует статическая ошибка).
К недостаткам И-закона следует отнести плохие динамические свойства: большое динамическое отклонение параметра (большое А 1) и большое время регулирования t р. Эти недостатки объясняются тем, что регулируемый орган после включения регулятора в работу будет непрерывно перемещаться (рис. 5.4) до тех пор, пока на входе в управляющее устройство будет сигнал Dy, и отключаться, когда Dy=(y–y0) станет равно нулю, а регулируемый параметр станет равен заданному значению (рис. 5.5). В связи с этим И-регуляторы применяются достаточно редко и только на статических объектах, обладающих большой емкостью, в которых параметр изменяется медленно.
Для улучшения динамических свойств регулятора необходимо регулирующий орган периодически останавливать в промежуточном положении. С этой целью в регулятор вводят обратные связи по положению регулирующего органа, которые изменяют закон регулирования.

