 2014-02-02
2014-02-02 1862
1862ПД- и ПИД-законы регулирования получаются введением в регуляторы дополнительного импульса по скорости изменения регулируемого параметра j.
Получаем следующую структурную схему регуляторов (рис. 5.11)
Рис. 5.11. Структурная схема САР с ПД- и ПИД - регуляторами
Дф – дифференциатор – устройство для дифференцирования сигнала y по времени (получаем скорость изменения сигнала y)
Для упрощения выводов при получении законов регулирования используют в качестве дифференциатора идеальный дифференцирующий элемент. Тогда уравнение дифференциатора будет
 ,
,
Т д – время дифференцирования.
Передаточная функция дифференциатора
 .
.
Регулятор, как сложное соединение элементов, можно представить как последовательное соединение сложных элементов I и II. Передаточную функцию соединения I мы получали (W I(p)). Передаточная функция соединения II представляется суммой передаточных функций элементов И.У. и Дф.
 . (5.24)
. (5.24)
Тогда передаточная функция регулятора
 .
.
Рассмотрим качественно, что дает введение дополнительного сигнала по скорости изменения параметра.
Это можно посмотреть на графике изменения сигналов j и d j/ dt во времени (рис. 5.12).
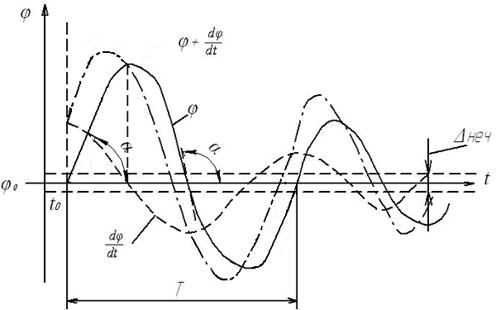
Рис. 5.12. График изменения параметра j и скорости его изменения dj/dt
Пусть измеряемый параметр изменяется по закону j, как это показано на графике. Скорость его изменения  на графике равна тангенсу угла наклона касательной (a) в точке касания (tga), что известно из графического представления производной. Тогда качественно
на графике равна тангенсу угла наклона касательной (a) в точке касания (tga), что известно из графического представления производной. Тогда качественно  будет изменяться по кривой, показанной штрихами.
будет изменяться по кривой, показанной штрихами.
На регулятор (на элемент сравнения) подается суммарный сигнал  , который на графике получается графическим сложением сигналов j и . Это дает следующие преимущества:
, который на графике получается графическим сложением сигналов j и . Это дает следующие преимущества:
1. Импульс по скорости заставляет регулятор сработать раньше, еще до того, как параметр j выйдет за пределы зоны нечувствительности регулятора Dнеч.
2. В первые моменты времени (в пределах первой четверти периода колебаний Т) импульсы по j и складываются (имеют один знак). На регулятор подается мощный суммарный сигнал, под действием которого регулирующий орган будет перемещаться на большую величину. Следовательно, приток среды или энергии в объект регулирования будет изменяться быстрее и баланс сред, или энергий, в объекте установится быстрее.
3. В целом это приводит к тому, что динамическое отклонение параметра А 1 будет меньше и время регулирования t р будет меньше, чем в регуляторах без введения импульса по скорости.








