 2014-02-02
2014-02-02 3666
3666Рис. 1.1. Управление по разомкнутой схеме.
Предисловие
Автоматизация машин, агрегатов, производственных процессов, систем управления имеет огромное значение для развития экономического и военного потенциала страны. Теория автоматического управления изучается во всех технических вузах, ей придается статус общеинженерной дисциплины при подготовке студентов технических специальностей.
Предлагаемое учебное пособие написано на основе лекций, читаемых авторами для студентов специальностей энергетического профиля 180101, 180102, 180400, 180408, 180700, 181300, 200400, 200404, 210211.
В книге приведены основные сведения по теории линейных систем автоматического управления, даны примеры, позволяющие усвоить основные теоретические положения.
Для освоения дисциплины требуется надлежащая математическая подготовка. В частности по линейным дифференциальным уравнениям, линейной алгебре, функциям комплексного переменного. Не менее важно овладение специальной терминологией.
Основные разделы книги следующие: общие сведения, математическое описание, описание типовых звеньев, передаточные функции систем, устойчивость, качество регулирования и синтез систем.
Авторы признательны проф. Андрееву Н.К. за полезные советы, высказанные при рецензировании книги, и благодарят сотрудника кафедры АТПП Филиппову М.Н. за помощь при подготовке рукописи.
Управление – это совокупность действий, направленных на достижение поставленной цели.
Регулирование – частный случай управления техническими системами. Регулирование направлено на достижение объектом заданного состояния.
Объектом управления (регулирования) являются устройства, реализующие физические, химические, биологические и иные процессы, связанные с движением массы, энергии и информации.
Управление объектом осуществляется посредством управляющего устройства. Применительно к техническим системам используются термины регулирующее устройство или регулятор.
Система – набор взаимодействующих элементов, обеспечивающих общий режим функционирования. Под элементом подразумевается любое техническое устройство, выполняющее назначенную функцию.
Управляющее устройство и объект управления образуют систему управления. Она называется разомкнутой, если сигнал передается в одном направлении, от управляющего устройства к объекту управления, рис. 1.1. Система называется замкнутой, если сигнал передается не только от управляющего устройства к объекту управления, но и обратно, от объекта управления к управляющему устройству, рис. 1.2. В замкнутой системе различают соответственно канал прямой связи и канал обратной связи. Если устранить обратную связь, замкнутая система становится разомкнутой.
Система управления (регулирования) характеризуется состоянием: значением всех параметров и показателей в данный момент времени.
Параметром называют количественную характеристику, показателем – качественную.
Система автоматического управления (САУ) или система автоматического регулирования (САР) – это совместное действие управляющего устройства (регулятора) и объекта управления (регулирования).
Изменение параметров объекта управления происходит под влиянием воздействий. Термином «воздействие» объединяют причины, изменяющие параметры объекта: электрические и др. сигналы, давление, смещение и т.п. Воздействия классифицируют на:
- задающие - команды управляющему устройству (регулятору);
- управляющие (регулирующие) - изменяют параметры, определяющие состояние объекта;
- возмущающие - случайные воздействия окружающей среды на объект управления.
Каждому воздействию присваивается обозначение: задающее – u (t), управляющее – x (t), управляемое – y (t), возмущение – z (t). Все они функции времени.
Наряду с термином «воздействие» употребляют термин «сигнал».
Направление, в котором действуют (распространяются) воздействие (сигнал), на схемах обозначают стрелками.
 z (t)
z (t)
|
|
 |  |  | |||||
 |
y (t)
 |
Рис. 1.2. Управление по замкнутой схеме.
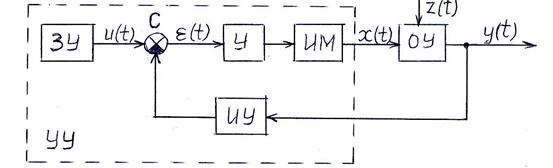
Рис. 1.3. Развернутая функциональная схема замкнутой САУ.
Штриховыми линиями очерчено управляющее устройство.
Рассмотрим схему, представленную на рис. 1.3. На ней обозначены шесть элементов, выполняющие функции, необходимые для осуществления процесса автоматического управления.
Задающее устройство (ЗУ) – вырабатывает команды управляющему устройству (регулятору).
Сумматор (С) – устройство, алгебраически суммирующее сигналы, поступающие от задающего устройства и по каналу обратной связи. Затушеванный сектор означает, что сигнал обратной связи имеет знак, противоположный знаку сигнала от задающего устройства.
Усилитель (У) – устройство, усиливающее сигнал, поступающий от сумматора.
Исполнительный механизм (ИМ) – вырабатывает воздействие, способное изменить управляемый параметр объекта управления.
Объект управления (ОУ) – устройство, процесс в котором изменяют для достижения поставленной цели.
Измерительное устройство (ИУ) – регистрирует сигнал, свидетельствующий об изменении параметра объекта управления, преобразует его и посылает в сумматор.
Взаимодействие элементов обеспечивается движением сигналов. Направление указывается стрелками.
Проанализируем работу схемы.
На вход объекта управления ОУ подается управляющее воздействие x (t). На выходе снимается сигнал y (t),свидетельствующий о состоянии объекта. Под влиянием возмущения z (t) величина y (t) отклоняется от назначенной. Сигнал регистрируется измерительным устройством ИУ и поступает на сумматор С. Линия, по которой объект управления посылает информацию о состоянии объекта в управляющее устройство УУ, образует обратную связь ОС. Назначение сумматора – сравнить сигнал от объекта управления с задающим сигналом u (t). Последний поступает от задающего устройства ЗУ. Сумматор вычитает один сигнал из другого и формирует сигнал рассогласования (ошибки): e (t) = u (t) – y (t). Сигнал рассогласования может быть отрицательным или положительным, смотря по тому, больше регулируемая величина y (t) чем задаваемая u (t) или меньше. При любом неравенстве на усилитель У и далее на исполнительный механизм ИМ поступает сигнал, по знаку противоположный регулируемой величине. Получается, что управляющее устройство вырабатывает сигнал, обратный по знаку воздействия внешнего возмущения z (t). Тем самым действие возмущения нейтрализуется, процесс возвращается к норме, регулируемый параметр y (t) становится тем, который отвечает назначению.

