 2014-02-03
2014-02-03 859
859Таблица 5.1. Характеристики переходных процессов при различных настройках контура
| СО | МО | СО+Ф | |
| s, % | 43,4 | 4,3 | 8,1 |
| t1 | 3,1Тm | 4,3Тm | 7,6Тm |
| t3 | 16,6Тm | 8,4Тm | 13,3Тm |
Сравнивая настройку на СО и МО можно сделать вывод, что настройка на МО имеет малое перерегулирование и большое быстродействие, но при этом система является статической. Быстродействие и перерегулирование при оптимизации на симметричный оптимум (СО) вдвое хуже, чем при настройке на МО, но система становится астатической.
Перерегулирование с фильтром на входе снижается по причине замены скачка сигнала с выхода фильтра, т.е. на входе контура экспонентой.
Техническая реализация фильтра на входе системы представлена на рисунке 5.16.
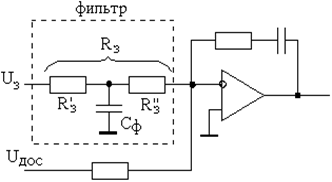 Рисунок 5.16 Рисунок 5.16 |
Применение ПИ-регулятора для объекта, содержащего интегрирующее звено и звено с малой постоянной времени позволяет построить систему астатическую по заданию и возмущению.
В АЭП в процессе регулирования требуется контролировать и ограничивать ряд координат ЭП на допустимом уровне (ток, напряжение и т.д.), поэтому современные системы АЭП многоконтурные.
Принципы построения многоконтурных систем АЭП:
1) Многоконтурные АЭП с параллельными контурами регулирования с одним или несколькими регуляторами
а) с одним регулятором (рисунок 5.17);
 Рисунок 5.17 Рисунок 5.17 |
б) с n-количеством регулируемых параметров.
Недостаток системы с одним регулятором – регулятор имеет компромиссную настройку для того, чтобы переходные процессы были требуемого качества в контурах скорости и тока.
Достоинство – относительно высокое быстродействие, если применяется несколько регуляторов (но в этом случае усложняется узел, который обеспечивает их совместную работу).
2) Многоконтурные системы с концентрическими контурами регулирования (рисунок 5.18).
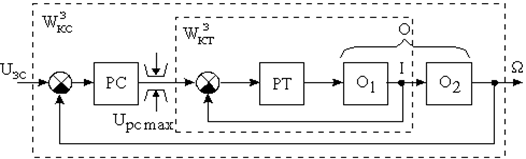 Рисунок 5.18 Рисунок 5.18 |
У каждого параметра свой регулятор, поэтому можно обеспечить оптимальность настройки каждого контура. Цепь регулирования определяется внешним контуром (в данном случае контуром скорости). Выходной сигнал РС является задающим для внутреннего контура. Контур тока является подчиненным контуру скорости, следовательно, это система с подчиненным регулированием параметров.
Достоинства:
- возможность реализации оптимальных законов управления каждого параметра;
- простота ограничения максимальных значений регулируемой величины за счет ограничения сигнала на входе соответствующего регулятора. Ограничение тока осуществляется за счет ограничения выходного сигнала РС, который является задающим для контура тока. Максимальная скорость привода ограничивается за счет ограничения максимальных сигналов задания на входе системы;
- упрощается расчет, наладка и реализация. Оптимизация системы начинается с внутреннего контура, который в дальнейшем будет представлен в виде звена с достаточно простой передаточной функцией, входящего в состав объекта внешнего контура.
Недостатки:
- быстродействие системы снижается по мере увеличения контуров регулирования;
- растет малая постоянная времени контуров регулирования.








