 2014-02-03
2014-02-03 505
505Структурная схема контура скорости представлена на рисунке 5.26.
СО:  ;
;
 .
.
Получили ПИ-регулятор, у которого kрс(со) = kрс(мо); Тиз = 4Тт.
 .
.

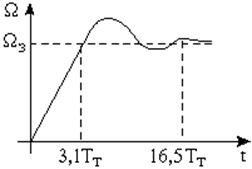
График переходного процесса контура скорости представлен на рисунке 5.28а. Такой переходный процесс будет только пока все звенья контура линейные (пока регулятор скорости не вышел на ограничение) и это возможно при подаче лишь малых сигналов задания.
  а) б)
Рисунок 5.28
а) б)
Рисунок 5.28
|
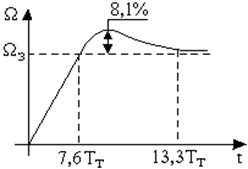
Такой переходный процесс в системах ЭП нежелателен, поэтому для уменьшения перерегулирования на входе включают фильтр.
 ,
,
где Тс(со) = 4Тт – эквивалентная постоянная времени оптимизированного на СО контура скорости.
Тс(мо) = 2Тт;
Тс(со) = 4Тт.
График переходного процесса контура скорости с фильтром на входе представлен на рисунке 5.28б.
Контур скорости, оптимизированный на СО с фильтром на входе имеет быстродействие вдвое меньшее, чем контур, оптимизированный на МО.
Данный контур скорости является по заданию астатическим второго порядка (только при наличии 2-й производной во входном сигнале появляется ошибка). Астатизм достигнут за счет уменьшения быстродействия.
При нелинейно изменяющемся входном сигнале задания на скорость на выходе регулятора будет сигнал, полученный в результате интегрирования и запоминания интегральной части регулятора. При появлении скоростной ошибки сигнал на выходе регулятора скорости будет изменяться, что будет приводить к изменению сигнала задания на ток и соответственно тока, что свидетельствует о переходных процессах в приводе. Скоростная ошибка в этой системе по заданию возможна только в начале и в конце отработки линейно изменяющегося сигнала задания.
Передаточная функция контура скорости по возмущению
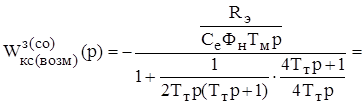
 ;
;
УР:  .
.








