2014-02-09
2014-02-09 1238
1238Контрольные вопросы
1. Что понимают под точностью измерений?
2. Дайте определение систематической погрешности и назовите их разновидности.
3. Дайте определение случайной погрешности и промаха.
4. Какие измерения называются «исправленными»?
5. Дайте определение основной и дополнительной погрешностей.
6. Дайте определение аддитивной и мультипликативной погрешностей.
7. Дайте определение абсолютной, относительной и приведенной погрешностей.
8. Как нормируются погрешности приборов?
9. Что такое класс точности прибора и как он определяется?
10. Как оценивается погрешность при однократных измерениях при прямых измерениях?
11. Как оценивается погрешность измерения при косвенных измерениях?
Структурная схема электромеханического измерительного прибора изображена на Рис. 4.1
 |
Рисунок 4.1
Она состоит из входной цепи, измерительного механизма и отсчетного устройства. Входная цепь преобразует входную величину x(t) в некоторую промежуточную величину y(t), непосредственно воздействующую на измерительный механизм. Измерительный механизм преобразует подводимую электрическую энергию, определяющую величину y(t) в механическую энергию перемещения подвижной части механизма. При этом между перемещением подвижной части измерительного механизма и измеряемой величиной существует однозначная зависимость. У большинства измерительных механизмов перемещение подвижной части состоит в повороте её на оси на угол α. Отсчетное устройство состоит из указателя и шкалы. Оно преобразует угловое перемещение подвижной части в перемещение указателя, которое представляется в делениях или миллиметрах шкалы. Измеряемая величина в измерительном механизме преобразуется в силу, создающую вращающий момент, под действием которого подвижная часть измерительного механизма поворачивается на угол α. Значение вращательного момента зависит от значения измеряемой величины: Мвр = f(x).
Для того, чтобы угловое перемещение подвижной части зависело от вращательного момента, в приборе создается противодействующий момент Мвр, направленный навстречу вращательному моменту. В большинстве приборов противодействующий момент при помощи упругих элементов, например, спиральной пружины. Противодействующий момент создаваемой пружиной, пропорционален углу поворота подвижной части прибора:
Мпр = W0 α,
где W0 - удельный противодействующий момент, зависящий от свойств пружины. Под действием вращательного момента подвижная часть прибора поворачивается на угол α, при котором наступает равенство Мвр = Мпр. Подставив значения моментов, получим равенство, из которого выведем уравнение шкалы прибора α = F(x). Если вращательный момент создается током I, то Мвр = k I, где k – коэффициент пропорциональности. В этом случае угол поворота подвижной части измерительного механизма:

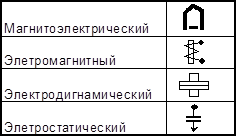
В зависимости от физических явлений, используемых для преобразования подводимой электромагнитной энергии в механическую энергию перемещения подвижной части механизма, приборы подразделяются на магнитоэлектрические, электромагнитные, электродинамические, электростатические и индукционные. В таблице 4.2 показаны условные обозначения приборов.
Табл.