 2014-02-17
2014-02-17 2091
2091В качестве основных механических координат ЭП понимают моменты М, действующие на элементы ЭП, и угловые скорости ω, с которыми эти элементы вращаются.
Зависимости M=f(ω) или наоборот ω= f(M) носят название статические механические характеристики электропривода. Соответственно M=f(t) и ω= f(t) называют динамическими механическими характеристиками.
Рассмотрим статические механические характеристики электропривода, принимая во внимание, что в качестве реальных элементов механической части силового канала ЭП обычно представлены:
1) Электромеханический преобразователь (электродвигатель), под действием которого создается вращающий электромагнитный момент, в результате чего электропривод приводится во вращение;
2) Исполнительный орган производственного механизма ИОПМ, который создает статический момент сопротивления МС.
Поэтому статические механические характеристики разделяют на два вида:
· Статические механические характеристики производственных механизмов, которые выражают собой зависимость статического момента сопротивления МС от угловой скорости вращения ω, с которой механизм приводится во вращение MС=f(ω);
· Статические механические характеристики электродвигателей, представляющие собой зависимость угловой скорости вращения ω от электромагнитного момента двигателя М, то есть ω= f(M).
Статические механические характеристики производственных механизмов.
Обобщенное математическое описания такой характеристики имеет следующий вид
 , (1.4)
, (1.4)
где  – статический момент сопротивления;
– статический момент сопротивления;
 – статический момент сопротивления механизма в режиме холостого хода (то есть без нагрузки);
– статический момент сопротивления механизма в режиме холостого хода (то есть без нагрузки);
 – статический момент сопротивления механизма, вращающегося со скоростью равной номинальной
– статический момент сопротивления механизма, вращающегося со скоростью равной номинальной  ;
;
γ – показатель степени, учитывающий характер зависимости МС(ω).
Для различных механизмов показатель степени γ принимает следующие значения:
· γ=0 для всех грузоподъемных механизмов, транспортных механизмов, а также поршневых насосов и компрессоров;
· γ=1 для генератора независимого возбуждения;
· γ=2 для турбомеханизмов, к которым относятся центробежные насосы, компрессоры, вентиляторы и т. д.
Характеристики для этих механизмов в зависимости от показателя степени γ приведены на рисунке 1.5.
 |
Рисунок 1.5 – Характеристики механизмов в зависимости от показателя степени γ.
Необходимо отметить, что существует ряд более сложных механизмов, для которых зависимость МС=f(ω) не может быть представлена в виде уравнения (1.4), например, станки качалки (они имеют более сложное математическое описание близкое к синусоидальной функции).
Статические механические характеристики электродвигателей.
С точки зрения логики этой характеристики она должна располагаться в первом квадранте координатной плоскости и при этом для двигателей различных типов зависимости ω=f(M) будут иметь вид, показанный на рисунке 1.6.
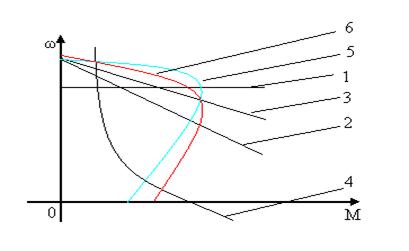
Рисунок 1.6 – Статические механические характеристики электродвигателей: 1 – синхронный электродвигатель; 2 – двигатель постоянного тока независимого возбуждения; 3 – двигатель постоянного тока смешанного возбуждения; 4 – двигатель постоянного тока последовательного возбуждения; 5 – асинхронный двигатель с короткозамкнутым ротором; 6 – асинхронный двигатель с фазным ротором.
Основным свойством механических характеристик электродвигателей является наклон рабочих частей этих характеристик по отношению к осям. При этом чем меньше наклон характеристики, тем она жестче. Это свойство характеризует устойчивость работы электродвигателя при различных нагрузках на его валу.

