2014-02-18
2014-02-18 808
808Разберем подробнее некоторые виды преобразователей.

μ –магнитная проницаемость среды
для парамагнетиков и диамагнетиков μ практически равно единице, а для ферромагнетиков μ имеет парядок 104. К ферромагнетикам относят Fe, Co, Ni. В дальнейшем будем рассматривать ферромагнетики – они бывают двух видов:
– магнитомягкие (электротехнические стали, арикор, пермаллой, супермаллой);
– магнитотвердые.
Магнитомягкие материалы – характеризуются узкой петлей гистерезиса:
|
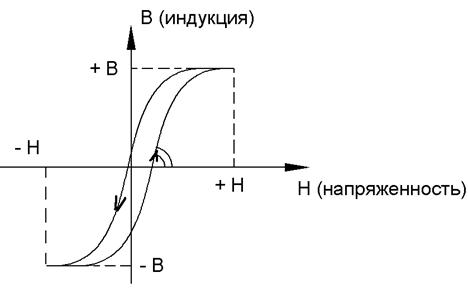
Иногда петля гистерезиса ферромагнетика близка к прямоугольной. Она характеризует энергию, затраченную на перемагничивание.
B = μH
μ – тангенс угла наклона петли.
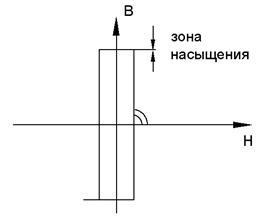
Наиболее близкую к прямоугольной петлю гистерезиса имеют материалы пермаллой, супермаллой. Чем больше μ – тем выше проводимость.
Магнитотвердые материалы – материал постоянных магнитов с очень широкой петлей гистерезиса, что говорит о необходимости большого количества энергии на перемагничивание.
Произведение B на Н эквивалентно энергии.

Xм – компонента комплексного сопротивления, которая проявляется на переменном токе и характеризует потери энергии, затрачиваемые на перемагничивание и на вихревые токи.
Будем рассматривать материалы у которых: Xм << Rм
Для воздуха: Zм = Rм
Xм à0
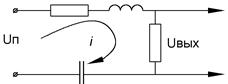
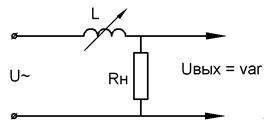
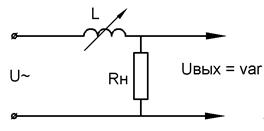
Электрокинематическая схема индуктивного датчика

1) статор;
2) ротор – ферримагнитный (проводящий) материал;
3) обмотка;
4) резистор нагрузки
|
На железном сердечнике 1 намотана катушка 3. Если изменять воздушный зазор  посредством перемещения якоря 2, например, под действием силы F, то коэффициент самоиндукции L катушки 3 будет изменяться, вследствие чего сила тока i, протекающего по катушке также будет изменяться. Таким образом каждому значению силы F и зазора будет соответствовать вполне определенное значение индукции L, а следовательно, и определенное значение силы тока i.
посредством перемещения якоря 2, например, под действием силы F, то коэффициент самоиндукции L катушки 3 будет изменяться, вследствие чего сила тока i, протекающего по катушке также будет изменяться. Таким образом каждому значению силы F и зазора будет соответствовать вполне определенное значение индукции L, а следовательно, и определенное значение силы тока i.
Индуктивность катушки:  (1), где
(1), где 
Напряжение питания и выхода: 
W - количество витков катушки;
ZM – магнитное сопротивление
Jx – реактивная составляющая магнитного сопротивления
Чтобы реактивные составляющие магнитного сопротивления были меньше, статор и ротор делают из шихтованного материала (изолированные друг от друга пластины), для уменьшения вихревых токов. Но остаются гистерезисные характеристики, поэтому используются магнитомягкие материалы - пермаллой, супермаллой.
Тогда можно записать:
 -длина пути;
-длина пути;
 магнитная проницаемость;
магнитная проницаемость;
S – сечение, в котором располагаются магнитные линии;
Далее везде считают, что  ;
;
 ;
;  ;
;  , в зависимости последовательное соединение или параллельное.
, в зависимости последовательное соединение или параллельное.
Рассмотрим электрическую схему:
Для схемы имеем:

Рассмотрим эквивалентную магнитную схему:
Магнитная цепь (магнитная составляющая)
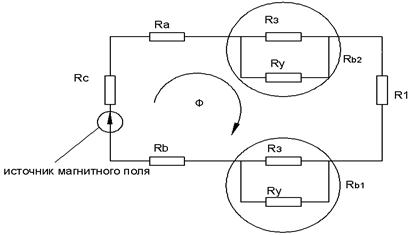
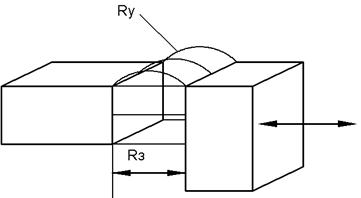
Ry – сопротивление утечки
Rз – сопротивление зазора
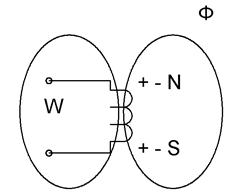
Ф – магнитный поток.
Rв1, Rв2 – сопротивление воздуха 1 и 2
Sв - сечение, соответствующее ширине полюса;
Rв и Rу соединены параллельно, чем меньше зазор, тем меньше Rу

Для магнитных цепей применимы законы расчета электрических цепей, такие как оба закона Кирхгоффа
Рассмотрим подробнее в объеме:
Стараются делать так чтобы:
 – доминирующая
– доминирующая
Эквивалентная магнитная цепь прибора в следующем приближении:

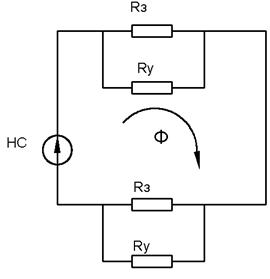
НС – намагничивающая сила
|
|
|


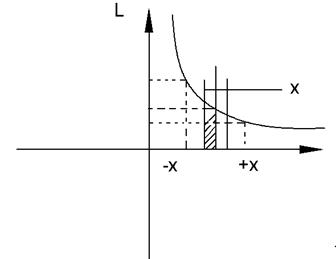
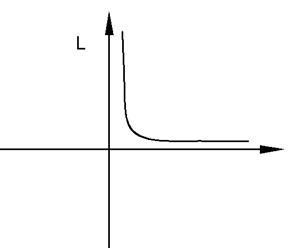
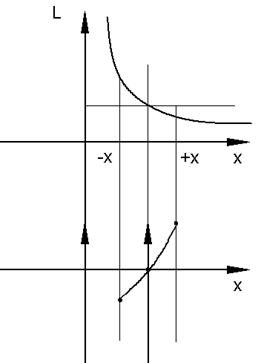
Построим график зависимости индуктивности от смещения:
|
|
|
|
|
|
|
|
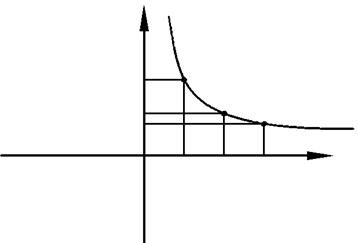
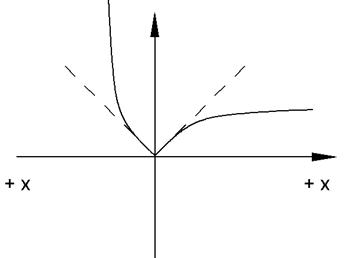
как видно ΔL (+x) не равно ΔL (-x)
При нулевом зазоре индуктивность не стремиться к бесконечности, т. к. пройдено сопротивление воздуха, но остается сопротивление железа, при этом она достигает максимального значения.
Видно что ΔL – нелинейная функция
|
|

Данное выражение можно разложить в ряд Тейлора.

для членов  порядка 2,3 и более верно следующее:
порядка 2,3 и более верно следующее:

исходя из этого запишем:

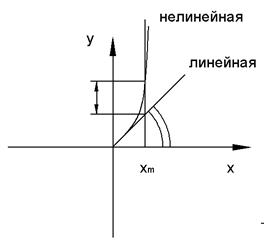
Нелинейность возникает из-за того, чтобы удельный вес * не превосходил какой-либо наперед заданной величины.

|


Максимальное изменение индуктивности определяется из определения  . Такой тип датчика, описанного выше – это недифференциальный индуктивный датчик с изменяемым зазором.
. Такой тип датчика, описанного выше – это недифференциальный индуктивный датчик с изменяемым зазором.
Параметры:
|
|

|
|

 |

|
|
|
|
|
|
Для увеличения диапазона линейной работы предпочтительными являются:
– дифференциальные схемы индуктивных датчиков
– индуктивные датчики с другими изменяемыми параметрами

1). С изменяемым зазором (дифференциальный датчик)

2). Индуктивный датчик с изменяемой площадью перекрытия

3). Датчик с изменяемой магнитной проницаемостью