 2014-02-24
2014-02-24 5533
5533Содержание лекции: анализ динамической устойчивости простейшей системы.
Цель лекции: рассмотрение режимов работы системы при внезапном отключении одной из двух параллельных цепей электропередачи.
Рассмотрим простейших случай, когда электростанция работает через двухцепную линию на шины бесконечной мощности. Условие постоянства напряжения на шинах системы (U = соnst) исключает качания генераторов приемной системы и значительно упрощает анализ динамической устойчивости.
Для выяснения принципиальных положений динамической устойчивости рассмотрим явления, возникающие при внезапном отключении одной из двух параллельных цепей электропередачи (см. рисунок 12.1), связывающей удаленную станцию с шинами неизменного напряжения.
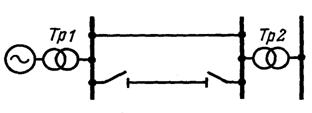
Рисунок 12.1
Схема замещения в нормальном режиме (до отключения цепи) представлена на рисунке 12.2,а. Индуктивное сопротивление системы
Хс = Хг + Хт1 + 0,5Хл + Хт2,
определяет амплитуду характеристики мощности в этих условиях:
 .
.
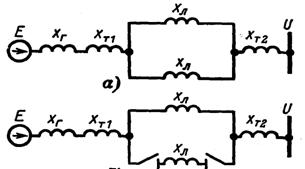
Рисунок 12.2
При отключении одной цепи линии электропередачи индуктивное сопротивление системы получает новое значение
Хс1 = Хг + Хт1 + Хл + Хт2,
которое больше, чем в нормальном режиме. Амплитуда характеристики мощности при отключении цепи соответственно уменьшается до значения ЕU/Хс1.
Характеристики мощности в условиях нормального режима и при отключенной цепи показаны на рисунке 12.3.
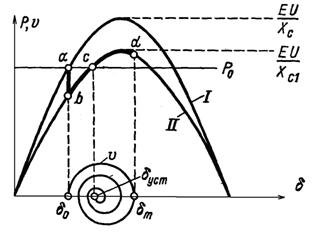
Рисунок 12.3
Нормальному режиму соответствует кривая I, режиму после отключения – кривая II. Точка а и угол δ0 при мощности Р0 определяют режим работы до отключения. Точка b определяет режим работы после отключения при том же значении угла δ = δ0, что и в нормальном режиме.
Таким образом, в момент отключения цепи режим работы изменяется и характеризуется не точкой а, а точкой b на новой характеристике, что обусловливает внезапное уменьшение мощности генератора. Мощность турбины остается при этом неизменной и равной Р0, так как регуляторы турбин реагируют на изменение частоты вращения агрегата, которая в момент отключения цепи сохраняет свое нормальное значение.
Неравенство мощностей, а следовательно, и моментов на валу турбины и генератора вызывает появление избыточного момента, под влиянием которого агрегат турбина – генератор начинает ускоряться. Связанный с ротором генератора вектор ЭДС  начинает вращаться быстрее, чем вращающийся с неизменной синхронной скоростью ω0 вектор напряжения шин приемной системы
начинает вращаться быстрее, чем вращающийся с неизменной синхронной скоростью ω0 вектор напряжения шин приемной системы  .
.
Изменение относительной скорости вращения приводит к увеличению угла δ, и на характеристики мощности генератора при отключенной цепи рабочая точка перемещается из точки b по направлению к точке с. При этом мощность генератора начинает возрастать. Однако вплоть до точки с мощность турбины все еще превышает мощность генератора и избыточный момент, хотя и уменьшается, но сохраняет свой знак, благодаря чему относительная скорость вращения непрерывно возрастает. В точке с мощность турбины и генератора вновь уравновешивают друг друга и избыточный момент равен нулю. Однако процесс не останавливается в этой точке, так как относительная скорость вращения ротора достигает здесь наибольшего значения и ротор проходит точку с по инерции.
При дальнейшем росте угла δ мощность генератора уже не превышает мощность турбины и избыточный момент изменяет свой знак. Он начинает тормозить агрегат. Относительная скорость вращения v теперь уменьшается и в некоторой точке d становится равной нулю. Это означает, что в точке d вектор ЭДС вращается с той же угловой скоростью, что и вектор напряжения и угол δ между ними больше не возрастает. Однако процесс еще не останавливается, так как вследствие неравенства мощностей турбины и генератора на валу агрегата существует избыточный момент тормозящего характера, под влиянием которого частота вращения продолжает уменьшаться, и рабочая точка, характеризующая процесс на характеристике мощности, перемещается в обратном направлении к точке с. Эту точку ротор вновь проходит по инерции, и около точки b угол достигает своего нового минимального значения, после чего вновь начинает возрастать. После ряда постепенно затухающих колебаний в точке с устанавливается новый установившийся режим с прежним значением передаваемой мощности Р0 и новым значением угла δуст. Картина колебаний угла δ во времени показана на рисунке 12.4.
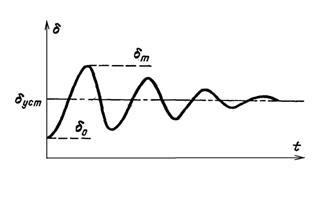
Рисунок 12.4
Возможен и другой исход процесса (см. рисунок 12.5). Торможение ротора, начиная с точки с, уменьшает относительную скорость вращения ЭДС v. Однако угол в этой фазе процесса все еще возрастает, и если он успеет достигнуть критической величины δкр в точке с на пересечении падающей ветви синусоиды мощности генератора с горизонталью мощности турбины Р0 прежде, чем относительная скорость v упадет до нуля, в дальнейшем избыточный момент на валу машины становится вновь ускоряющим, скорость v начнет быстро возрастать и генератор выпадает из синхронизма (см. рисунок 12.6).
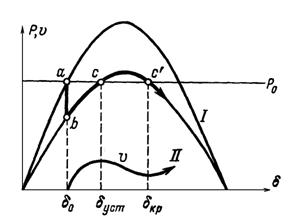
Рисунок 12.5
Таким образом, если в процессе качаний будет пройдена точка с', то возврат к установившемуся режиму уже невозможен.
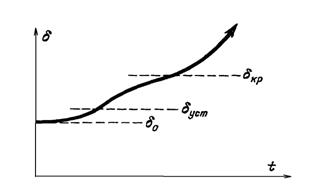
Рисунок 12.6
Можно сделать вывод, что, несмотря на теоретическую возможность существования нового установившегося (и статически устойчивого) режима в точке с, процесс качания машины при переходе к этому режиму может привести к выпадению машины из синхронизма. Такой характер нарушения устойчивости называется динамическим.
Основной причиной нарушений динамической устойчивости электрических систем являются обычно короткие замыкания, резко уменьшающие амплитуду характеристики мощности.
13 Лекция. Динамическая устойчивость при коротком
замыкании на линии
Содержание лекции: динамическая устойчивость при КЗ на линии.
Цель лекции: анализ колебаний по правилу площадей.
Наиболее распространенным видом возмущений, приводящим к необходимости анализа динамической устойчивости, является короткое замыкание.
Рассмотрим сначала простейший случай работы электростанции через двухцепную линию электропередачи на шины бесконечной мощности (см. рисунок 13.1).
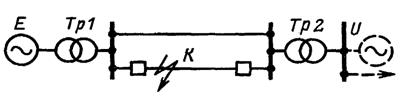
Рисунок 13.1
На рисунке 13.2 приведена упрощенная схема замещения рассматриваемой системы при нормальном режиме, представляющая собой последовательное соединение индуктивных сопротивлений элементов системы
Хс = Хг + Хт1 + 0,5Хл + Хт2.
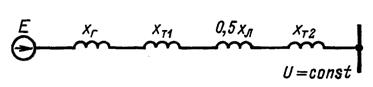
Рисунок 13.2
Характеристика мощности в нормальном режиме определяется
 .
.
Эта зависимость представлена на рисунке 13.4 (кривая I). Предположим, что в начале одной из цепей линии в точке К произошло несимметричное КЗ. Схема замещения для этого режима представлена на рисунке 13.3 а, где в точке К включено эквивалентное шунтирующее сопротивление КЗ Хк, состоящее из сопротивлений обратной и нулевой последовательностей.
В связи с изменением конфигурации схемы вследствие КЗ при неизменной ЭДС генератора значение передаваемой системе мощности изменяется. Выражение для передаваемой мощности при КЗ можно найти с помощью простых преобразований схемы замещения для аварийного режима. Эта схема представляет собой с лучами Хк, Ха = Хг + Хт1 и Хb = 0,5Хл + Хт2, причем для однофазного КЗ Хк = Х2 + Х0, для двухфазного КЗ Хк = Х2, а для двухфазного замыкания на землю  .
.
После преобразования звезды в треугольник (см. рисунок 13.3 б), получим
 ;
;  ;
;  . (13.1)
. (13.1)
Индуктивные сопротивления  и
и  , подключенные непосредственно к ЭДС Е и напряжению U, не влияют на значение активной мощности генератора в аварийном режиме и могут не учитываться.
, подключенные непосредственно к ЭДС Е и напряжению U, не влияют на значение активной мощности генератора в аварийном режиме и могут не учитываться.
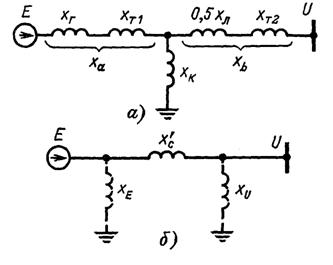
Рисунок 13.3
Весь поток активной мощности генератора будет протекать через индуктивное сопротивление  , связывающее ЭДС генератора с напряжением приемной системы. В этом случае характеристика мощности генератора имеет вид
, связывающее ЭДС генератора с напряжением приемной системы. В этом случае характеристика мощности генератора имеет вид
 , (13.2)
, (13.2)
где =  .
.
Зависимость от угла имеет синусоидальный характер, но амплитуда ее меньше, чем при нормальном режиме. Обе характеристики приведены на рисунке 13.4.
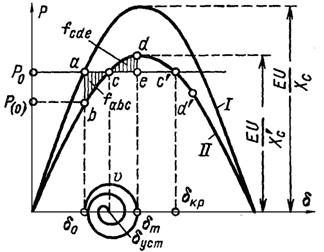
Рисунок 13.4
Отдаваемая генератором мощность и угол между ЭДС Е и напряжением U в нормальном режиме обозначены соответственно через Р0 и δ0. В момент КЗ в связи с изменением параметров схемы происходит переход с одной характеристики мощности на другую, и так как вследствие инерции ротора угол δ мгновенно измениться не может, то отдаваемая генераторами мощность уменьшается до значения Р(0), определяемого углом δ0 на кривой II. Мощность турбины остается неизменной и равной Р0.
В результате на валу машины возникает некоторый избыточный момент, обусловленный избытком мощности ΔР(0) = Р0 – Р(0). Под влиянием этого момента ротор машины начинает ускоряться, увеличивая угол δ. В дальнейшем процесс протекает качественно так же, как и при внезапном отключении нагруженной линии. После нескольких колебаний с постепенно затухающей амплитудой относительное движение ротора прекратится и его положение будет определяться точкой с, являющейся точкой установившегося режима на новой характеристике мощности. Если бы ротор при первом отклонении прошел угол δкр, соответствующий мощности Р0 на подающей ветви характеристики II, то избыточный момент вновь изменил бы свой знак и сделался бы снова ускоряющим. С дальнейшим увеличением угла ускоряющий момент стал бы нарастать и генератор выпал бы из синхронизма.
Приведенные на рисунке 13.4 характеристики дают возможность определить максимальное отклонение угла ротора и установить, сохраняет ли система устойчивость. Действительно, ординаты заштрихованных площадок представляют собой избыток мощности ΔР = Р0 – Р, создающий избыточный момент того или иного знака. Избыточный момент в относительных единицах может быть принят численно равным избытку мощности, т.е ΔМ = ΔР.
В рассматриваемом случае избыточный момент сначала ускоряет вращение ротора, и работа, совершаемая в период ускорения при перемещении ротора от δ0 до δуст, равна:
 ,
,
где  - заштрихованная на рисунке 13.4 площадка abc.
- заштрихованная на рисунке 13.4 площадка abc.
Таким образом, кинетическая энергия, запасенная ротором в период его ускорения, равна площадке . Эта площадка называется площадью ускорения.
После того как ротор пройдет точку своего установившегося положения на новой характеристике мощности, избыточный момент меняет свой знак и начинает тормозить вращение ротора. Изменение кинетической энергии в период торможения при перемещении ротора от δуст до δm равно:
 .
.
Площадка  называется площадь торможения.
называется площадь торможения.
В период торможения ротор возвращает запасенную им ранее избыточную кинетическую энергию. Когда вся запасенная ротором избыточная энергия будет израсходована, т.е когда работа торможения Аторм уравновесит работу ускорения Ауск, относительная скорость становится равной нулю, т.к кинетическая энергия пропорциональна квадрату скорости. В этот момент ротор останавливается в своем относительном движении и достигнутый им при этом угол δm является максимальным углом отклонения ротора машины. Таким образом, для определения угла δm оказывается достаточным равенство  , или то же самое,
, или то же самое,
 . (13.3)
. (13.3)
Уравнение (13.3) показывает, что при максимальном угле отклонения площадь торможения должна быть равна площади ускорения и, следовательно, задача сводиться к тому, чтобы найти положение точки d, удовлетворяющее этому условию (см. рисунок 13.4), что может быть сделано графически.
Максимально возможная площадь торможения равна площадке  . Если бы эта площадь оказалась меньше площади ускорения , то система выпала бы из синхронизма. Отношение возможной площади торможения к площади ускорения называется коэффициентом запаса устойчивости
. Если бы эта площадь оказалась меньше площади ускорения , то система выпала бы из синхронизма. Отношение возможной площади торможения к площади ускорения называется коэффициентом запаса устойчивости  .
.
Когда возможная площадь торможения получается меньше площади ускорения, иногда возможно добиться устойчивой работы, достаточно быстро отключив поврежденную цепь. Мощность, которую можно передать по второй, оставшейся в работе цепи, обычно больше мощности, передаваемой по двум цепям при КЗ. Уравнение мощности при отключении поврежденной цепи имеет следующий вид:
 ,
,
где  .
.
Эта зависимость показана на рисунке 13.5 в виде кривой III. Кривые I и II представляют собой характеристики при нормальном режиме и при КЗ.
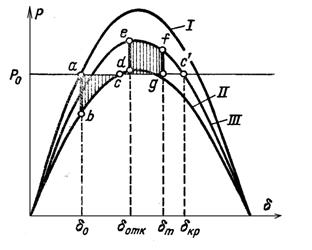
Рисунок 13.5
В момент КЗ передаваемая мощность падает, и ротор начинает ускоряться. Пусть в некоторой точке d происходит отключение поврежденной цепи. В момент выключения работа переходит в точку е на кривой III, и отдаваемая генераторами мощность значительно повышается. Благодаря этому максимально возможная площадь торможения  получается значительно больше, чем при длительном неотключенном КЗ, и это увеличение тем больше, чем раньше происходит отключение, т.е. чем меньше угол отключения δотк. Таким образом, быстрая ликвидация аварий может значительно повысить устойчивость системы.
получается значительно больше, чем при длительном неотключенном КЗ, и это увеличение тем больше, чем раньше происходит отключение, т.е. чем меньше угол отключения δотк. Таким образом, быстрая ликвидация аварий может значительно повысить устойчивость системы.
С помощью рисунка 13.5, пользуясь правилом площадей, можно графически найти предельное значение угла δотк, при котором нужно произвести отключение поврежденной для того, чтобы добиться устойчивой работы. Значение этого угла определяется равенством площади ускорения и максимальной возможной площади торможения.
Однако для практических целей этого недостаточно. Необходимо знать не угол δотк, а тот промежуток времени, в течение которого ротор успевает достигнуть этого угла, т.е так называемое предельно допустимое время отключения КЗ, которое определяется методом последовательных интервалов.

